高等教育领域数字化综合服务平台






上海交通大学
教育部
- 66 高校采购信息
- 212 科技成果项目
- 0 创新创业项目
- 0 高校项目需求
惯性导航系统运动对准技术
2021-04-13 00:00:00
云上高博会
https://heec.cahe.edu.cn
关键词:
运动对准技术


所属领域:
项目成果/简介:
本技术涉及一种惯性导航系统的运动对准方法,即如何在运动情况下借助GNSS信息提供惯性导航系统的初始姿态。在舰载机、制导弹药、水下无人潜航器和地面机动车辆等应用中,要求INS能够在运动过程中进行对准。目前运动对准的主流方法借鉴了静态或准静态情况下的实现思路,即通常包括粗对准和精对准两个阶段。粗对准用于得到粗略的初始姿态,为精对准提供初始值。精对准通常采用基于泰勒级数展开的非线性滤波方法,如一阶线性近似的扩展卡尔曼滤波EKF等。采用EKF等非线性滤波方法进行精对准,需要知道较准确的惯性器件,例如陀螺和加速度计,以及外部速度/位置信息的噪声特性,而且要求粗对准提供的初始姿态误差不能过大,否则滤波器将不能在规定的时间内收敛到理想的精对准结果,有时甚至发散。
在本技术考虑的应用场合中,INS安装在运动载体上,INS的速度和位置信息由GPS或其他外部信息源给出。
本技术的特色和优势:在没有任何姿态先验初值的情况下可实现惯性导航系统的快速姿态对准,无需知道惯性器件及外部速度/位置信息的噪声特性,无需任何姿态初值,具有绝对的计算稳定性,不存在发散的情况,只要速度/位置辅助信息有效,能够在任意运动情况下实现姿态对准,大幅缩短载体导航前的准备时间。
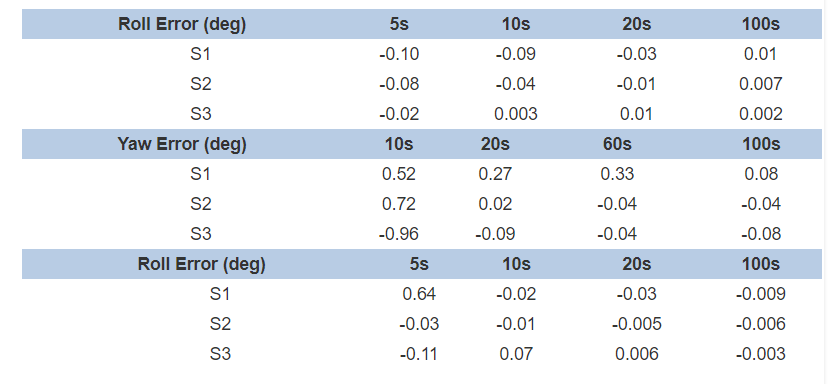
飞行试验测试典型结果:

其中S1为上升段,S2为转弯段,S3为下降段。数据长度均为100s。下表分别给出了三个姿态误差角在5s,10s,20s和100s时情况:
项目阶段:

扫码关注,查看更多科技成果
取消
确定