





- 252 高校采购信息
- 578 科技成果项目
- 10 创新创业项目
- 0 高校项目需求
轮足式移动平台、运行模式切换方法及轮足式机器人


1.痛点问题
随着自动化技术的不断发展,机器人的应用领域愈发广泛,包括运输、勘探、医疗、救灾及消防等领域,机器人能按预先设计好的指令代替人工执行任务。目前常见的机器人,虽具有较高的运行效率,但在复杂环境下行走能力较低。使机器人同时具有较高的运行效率和越障能力,是目前业界亟待解决的痛点问题。
2.解决方案
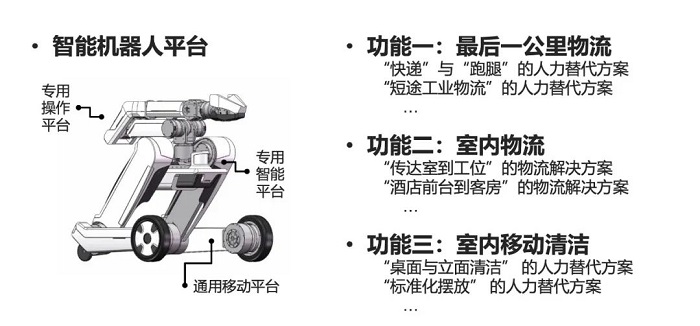
本成果提供一种轮足式移动平台、运行模式切换方法及轮足式机器人,该轮足式移动平台包括:腿部机构与机械臂。其中,腿部机构在负载增大情况下,可脱离平衡算法限制,利用轮组动力实现高速移动;机械臂可变换形态,完成抓取物体等操作。通过不同状态的切换,机器人可实现迈过障碍、自适应复杂地形、高速移动等功能。
3.合作需求
1)办公及生产场地;
2)应用合作伙伴:包括高等教育、工业园区、写字楼、酒店行业在内的应用合伙作伴。
本成果可用于物流末端配送、地形勘探、环境监控、设备巡检等智能应用,赋能数个千亿规模市场,提升各应用领域的工作效率、降低用工成本,并在危险场景中解放人力、规避事故风险。
本成果拟转化设立企业,目前用于早期原型样机与核心算法的研发。计划将进一步应用于软硬件的产品化与贴近应用的解决方案中,结合市场需求,进行扩展开发。团队将从包括教育在内的特殊行业应用起步,逐步提升供应链管理、技术能力与团队经营能力,建立以系统解决方案为主的盈利模式,在此基础上逐代向大众日常物流应用开展技术与产品研发。相关的目标客户主要为无人巡检与无人配送。巡检类应用将面向电网公司、地产公司、厂区等。无人配送主要面向物流公司、服务公司、工业园区、写字楼及高端个人消费者等。
本成果采用机械臂支撑地面以及脚掌变换的方案支撑机身,使机器人负载更强;遇到障碍时,可变换脚掌状态,配合三自由度腿部关节,完成迈过障碍物的动作。本成果既可满足复杂地形的通过能力,又完全保留轮组的运动速度优势,技术领先,国内尚无相关的产业化企业,全球范围内相关技术在高校科研机构及企业研究院中亦处于探索阶段。

扫码关注,查看更多科技成果