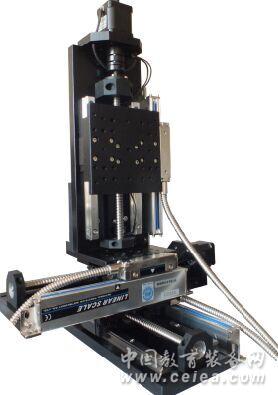
闭环三轴位移台
产品详细介绍名称: 三维高精度位移台 标准配备有步进电机和标准RS232接口,配合运动控制器可实现自动控制 进口高品质滚珠螺杆驱动,重复定位精度好,寿命长 新型轴端结构,防止螺杆松动,特别适合高速往复使用 导轨采用精密线性轴承导轨(两端支撑,中间悬空), 运动舒适,但承载较小, 适合单轴使用,垂直使用效果最好 步进电机和滚珠螺杆通过进口高品质弹性联轴节连接,传动同步且噪音小 配有手轮,方便调试 两端装有零位和限位开关,方便准确定位和保护产品 底座有标准孔距的螺纹孔和通孔,方便安装固定 可换装伺服电机,实现高速或轴向重载 产品技术参数名称:三维高精度位移台型号MZ3100栅光栅信号TTL信号行程(mm)100直线位移台输出位移分辩率 (mm)0.005直线位移台输出精度(mm)0.001直线位移台输出重复定位精度0.002光栅尺闭环控制软件控制光栅尺返回信息软件显示螺杆导程(mm)4标配电机(1.8度步进角)42步进电机中心负载(Kg)20重量(Kg)10 三维高精度精密闭环电动直线平台外形尺寸长:480mm宽:352mm高:352mm
容智科技
2021-08-23



 搜 索
搜 索