高等教育领域数字化综合服务平台
云上高博会服务平台
高校科技成果转化对接服务平台
大学生创新创业服务平台
登录
|
注册
|
搜索
搜 索
综合
项目
产品
日期筛选:
一周内
一月内
一年内
不限
双
轴
椭圆高效振动筛
双轴椭圆高效振动筛是由北京科技大学设计,授权张家口市冶金机械厂独家制造的专利(专利号:ZL 00 2 50094.9)产品。其设计宗旨是:使振动筛总体结构和筛箱运动轨迹更为合理,以达到提高生产率和筛分效率,以及结构简化,拆装方便,工作可靠等目的。 与同类产品比较,主要具有以下优点: 1.采用强迫同步的双轴箱式振动器激振。利用两根轴上偏心块质量的不同,使筛箱作椭圆运动;强迫同步振动方式使筛箱启动、制动和运转十分平稳;箱式振动器保证了拆装方便;振动器重心偏移式安装使筛子总体高度减小。 2.先进的设计理念和现代化的设计手段确保筛箱的运动轨迹更为合理,有利于筛分。 3.振动筛筛面采用双折角,有利于实现等厚筛分 4.振动筛下方合理地配置有二次隔振系统,使传到地基的动负荷非常小。 5.先进而严格的加工制造工艺确保了设计思想的完美体现。
北京科技大学
2021-04-11
七
轴
柔性焊锡机器人
本项目研究开发出国内首创七轴柔性焊锡机器人,可以实现自动点焊、拖焊、抖焊等一系列焊接流程,并通过机器视觉采集坐标,对工件整体坐标位置自动校准、补偿。此外还可以编辑存储海量焊接加工文件,可以针对不同焊接产品的要求,快速切换焊接工艺,非常适合电子生产企业多品种产品生产工况的应用需求。 此外,该项目开发的机器人将先进制造技术、电子整机产品制造技术、电子表面组装技术、电子元器件和材料制造技术、集成电路制造技术和微组装技术进行了有机整合,还可用于教学演示,使高校以及职业技术学生了解、掌握现代电子制造企业在先进制造大环境下所涉及的产品设计、制造工艺及先进电子产品制造设备等相关知识、技术、技巧。 该产品为国内行业首创七轴柔性机器人,可以记忆烙铁姿态。具有烙铁磨损自动补偿功能,提高产品合格率。可以与外部信号或设备进行系统集成的多种逻辑指令,具有RS232\RS485\RS422等通讯接口,配备12寸工业级触摸屏,采用C#语言设计的示教人机界面,简单直观,便于操作。通过视觉识别系统,可以对焊接工件进行位置识别处理,通过三维运动平台进行精确定位,同时还可以对焊点进行图像数据处理。可以通过PCB图片进行焊点坐标采集并编辑焊接程序。质量可追溯,可接入MES系统。 研发团队已经开发出多款焊锡机器人,可以根据用户要求匹配不同功能模块,满足不同使用场景的技术需求。此外,通过更换焊接作业模块,在该系统平台上,还开发出了自动锁螺丝机器人、自动点胶机器人等系列产品。
北京航空航天大学
2021-04-10
两
轴
直流伺服驱动器
本实用新型公开了一种电机控制技术领域的两轴直流伺服驱动器,包括脉冲/方向输入接口、电流采样 接口、正交编码器反馈接口、数字信号处理器和功率放大电路,数字信号处理器和脉冲/方向输入接口相连 以接收脉冲/方向信号,数字信号处理器和电流采样接口相连以接收电流信号,数字信号处理器和正交编码 器反馈接口相连以接收位置反馈信号,数字信号处理器和功率放大电路相连以传输电机控制信号。本实用 新型能实现两个轴同时报故障并记录故障点,系统复位后能从故障点开始继续加工;使用一个数字信号 理器完成两个伺服电动机驱动,并且两轴特征参数同时上传上位机,从而可以在加工前先模拟加工效果 然后再安装主刀进行实际加工。
南京工程学院
2021-04-11
七
轴
柔性焊锡机器人
本项目研究开发出国内首创七轴柔性焊锡机器人,可以实现自动点焊、拖焊、抖焊等一系列焊接流程,并通过机器视觉采集坐标,对工件整体坐标位置自动校准、补偿。此外还可以编辑存储海量焊接加工文件,可以针对不同焊接产品的要求,快速切换焊接工艺,非常适合电子生产企业多品种产品生产工况的应用需求。
北京航空航天大学
2021-05-09
两
轴
直流伺服驱动器
本实用新型公开了一种电机控制技术领域的两轴直流伺服驱动器,包括脉冲/方向输入接口、电流采样接口、正交编码器反馈接口、数字信号处理器和功率放大电路,数字信号处理器和脉冲/方向输入接口相连接收脉冲/方向信号,数字信号处理器和电流采样接口相连接受电流信号,数字信号处理器和正交编码器反馈接口相连接收位置信号,数字信号处理器和功率放大电路相连传输控制信号。本实用新型能实现两个轴同时报故障并记录故障点,以便系统复位后能从故障点开始继续加工;使用一个数字信号处理器完成两个伺服电动机驱动(或称为两轴驱动),并且两轴特征参数同时上传上位机,从而可以在加工前先模拟加工效果,然后再安装主刀进行实际加工。
南京工程学院
2021-04-13
斜弯
轴
加工的工装夹具
斜弯轴加工的工装夹具,属于专用工装夹具,克服现有加工轴端含倾斜结构的斜弯轴出现的加工成本高、加工方法繁琐等问题,本发明的工装夹具,其直轴和倾斜部分为一整体,其直轴为阶梯形直轴,倾斜部分具有阶梯孔,阶梯孔中心线与直轴主轴线的夹角和被其加工斜弯轴的斜轴部分倾斜角度相同;阶梯孔孔径依次与被其加工斜弯轴的直轴部分的最后两级外圆直径相同。本发明结构简单,制造容易,应用本发明在普通车床上,经过一次装夹就能完成加工任务,根据被加工工件中倾斜结构角度的变化要求,可以相应改变夹具的夹角,形成工装设计的系列化及方便工装
华中科技大学
2021-04-14
六
轴
联动数控砂带磨床
本发明公开了六轴联动数控砂带磨床,包括床身、X 轴传动系 统、Y 轴传动系统、Z 轴传动系统、A 轴传动系统、B 轴传动系统、C 轴传动系统、砂带磨削系统、U 轴传动系统和排屑系统;B 轴传动系 统用于带动砂带磨削系统绕 Y 轴转动;C 轴传动系统用于带动砂带磨 削系统绕 Z 轴转动,实现砂带磨削系统的两自由度回转运动;砂带磨削系统位于排屑系统的上方以使金属磨屑掉入排屑系统;A 轴传动系 统安装在床身的一侧,用于夹紧叶片类工件并带动工件绕 X 轴转动。 本发明可以很好地应用于如汽轮机叶片、航空发动机
华中科技大学
2021-04-14
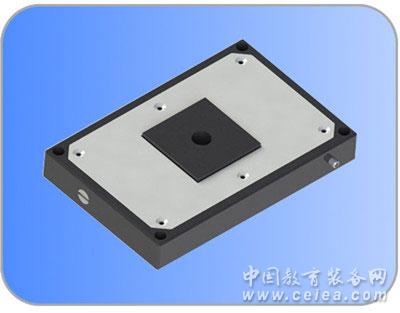
Z
轴
旋转微动平台(博实)
产品详细介绍:Z轴旋转微动平台是由压电陶瓷致动器驱动柔性铰链机构可实现Z轴旋转输出,输出转角为毫弧度级别,输出转角分辨率为微弧度级别。并可集成电阻应变片式传感器以实现高精度闭环控制。主要应用于光学、激光扫描、通信、光束偏转和光束偏摆。
哈尔滨工业大学博实精密测控有限责任公司
2021-08-23
单
轴
直线电机运动平台
产品详细介绍技术指标:SM2-2-544型直线电机 MicroE MII1600直线光栅编码器 Har5/60或HN4/150伺服驱动器 24VDC 10A直流电源 Hiwin直线导轨 安装底板及机械限位 Composer或MotionControl上位机调试软件 客户提供的PC机
北京慧摩森电子系统技术有限公司
2021-08-23
桌面型五
轴
数控机床
5X-MILLING桌面型5轴数控机床是五轴五联动立式数控铣床,能在一次装夹下自动加工复杂工件,完成钻、扩、铣、雕刻等多种加工。具有高集成度、高精度,使用维护简单,满足对三维曲面复杂结构微小零件加工要求。具有 USB 接口可实现数控加工程序、各种工艺参数和机床状态信息的传输。 机床封闭式防护装置齐全可靠,符合金属切削机床安全防护通用技术条件。 在机床正面设置有12寸电容触摸屏操作面板。机床结构设计合理,有足够的静态、动态、热态刚度,并能采用先进技术, 保证系统具有良好的动态品质。所有伺服驱动系统执行元件精度高、可靠性好、响应速度快。 利用该数控铣床,学生可以实际操作生产,体验高精度加工过程,学生将有效的学习到UG软件编程和数控操作能力,对数控刀具和几何视图里的MCS的建立知识有一个很好的掌握。
无锡铭知一智能科技有限公司
2022-05-23
首页
上一页
1
2
...
12
13
14
...
226
227
下一页
尾页
热搜推荐:
1
云上高博会企业会员招募
2
64届高博会于2026年5月在南昌举办
3
征集科技创新成果



 搜 索
搜 索