高等教育领域数字化综合服务平台
云上高博会服务平台
高校科技成果转化对接服务平台
大学生创新创业服务平台
登录
|
注册
|
搜索
搜 索
综合
项目
产品
日期筛选:
一周内
一月内
一年内
不限
MKRB-Y3激光切割
机器人
工作站
MKRB-Y3激光切割机器人工作站主要由切割机器人、伺服变位机、光纤激光切割电源、机器人激光割枪系统、安装框架、冷水机系统、集成控制系统等组成。可以24小时连续作业,跟人工作业相比,其效率,质量,稳定性等有很大提高。 三维光纤激光切割机器人系统是一种可对不同度的金属板材进行多角度,多方位柔性切割的先进的激光切割设备,其利用工业机器人灵活和快速的动作性能,根据用户切割加工工件尺寸的大小,通过将机器人进行正装或倒装,并针对不同产品、不同轨迹进行示教编程或离线编程,通过光纤激光切割头对不规则工件进行三维切割;利用光纤将激光传输到切割头上(光纤激光切割头上配备专用光纤随动装置和光路传输装置),再利用聚焦系统进行聚焦,可对多种三维金属板材进行多方位的切割。根据金属板材的厚度不同,所选光纤激光器的功率大小也不一样,对不同功率的激光器配备制冷量不同的冷却系统,以保障激光器的正常工作。本套三维光纤激光切割机器人系统作为激光应用技术的高端技术已经越来越广泛地应用干汽车制造行业加汽车零部件、汽车车身、汽车车门框、汽车后备箱,汽车车顶盖等各个方面。本套系统可以代替了传统的加工方式,降低了模具投资,大大缩短了汽车制造商和零部件配套商的开发周期,提高加工效率和切割工件的精度,降低了生产成本,是汽车制造商和零部件配套商提高竞争力的有力工具。
宁波摩科机器人科技有限公司
2022-11-07
MKRB-Y4电弧增材制造
机器人
工作站
机器人打印3D工作站六轴关节机器人,数字化焊接电源,推拉丝焊枪与防碰撞装置、3D离线编程软件、铣削减材系统、移动式煌接除尘器、3D柔性连接平台、控制系统、防碰撞焊枪、移动烟尘净化器、安全围栏等组成一套智能3D增材制作机器人打印工作站,可广泛用于有色金属的3D成型打印及工艺试验。满足教学需求,方便实际应用的高配置型机器人3D接工作站。本工作站按照企业应用要求:标准模快化设计,通过学习机器人工作站结构,配置选型、控制原理,PLC控制原理与编程,以及系统之间的通讯、3D打印工艺分析、工艺评定,工装设计原则、机器人外部轴的添加与联动。安全防护、1/0通讯、程序数据、程序编写、硬件连接、通讯方式设定。掌握机器人编程操作、M参数设定、工装设计基础、变位机选型与通讯。适合中高职、本科院校自动化、焊接及材料成型类相关专业《金属3D打印技术》、《工业机器人与控制技术》、《焊接自动化技术》《自动化技术》《金属3D打印技术》等课程的实训教学,提供机器人的编程、维护、焊接工艺的编制、工作站的项目设计及项目管理全方位实训与工艺试验论证。使用KRL结构模式设置可快速编写打印程序。将零件的三维模型输入到计算机3D打印制造软件中,由软件通过几何层面的分析,确定增材制造的策略,数模分层切片,多种加工策略,包括增材和减材制造的交善时机,并生成多种加策路和加工代码。
宁波摩科机器人科技有限公司
2022-11-07
MKRB-Y8机床上下料
机器人
工作站
该设备是培训数控机床上下料机器人操作技巧的一个工作站,通过它能够了解机床上下料机器人系统的基本构成,学习掌握机器人在机床上下料的基本功能,包括由机器人上下料搬运、原材料仓储、加工在线视觉检测、成品库仓库、通讯、多工装夹具快速切换等功能。该设备由上下料工业机器人、原材料仓库、视觉检测、成品仓库、快换装置等组成。
宁波摩科机器人科技有限公司
2022-11-07
用于物料自动化
搬运
的视觉自动导引车AGV系统
在物流系统中有三类典型的自动化传输设备:(1) 固定路径传输设备,如传输带;(2) 限定区域传输设备,如有轨小车;(3) 可变路径传输设备,如自动导引车AGV。AGV是一种具有自动导引装置,能够沿规定的导引路径行驶和停靠在指定的站点,并通过各种移载装置完成相关物料搬运任务的自动化运输车辆。在自动化程度、智能化水平、路径设置柔性及系统可重构性方面,AGV都要明显优于前两种传输设备,且易与计算机控制的全自动化生产系统有机结合。电磁感应导引和磁导引是AGV的传统导引技术,需要在运行路径地表埋
南京航空航天大学
2021-04-14
三
轴
力测量系统
在风洞模型实验、航天器陆地模拟测试、船舶工业遥感测控和汽车工业测试等领域中对不同测点三轴向支座反力进行测量时,三轴力测量系统有着广泛的应用。不同领域中对系统量程、频率特性、抗干扰特性等需求并不相同,本项目针对具体工程需求研发了一套三轴力测量系统。
西安交通大学
2021-04-11
单
轴
气浮平台
产品详细介绍技术指标: 矩形空气轴承,直线电机驱动 外形尺寸:250X130X140mm 设计行程:70mm 定位分辨率:1μm或0.5μm 重复定位精度:2μm 预留试验装置安装接口
北京慧摩森电子系统技术有限公司
2021-08-23
多
轴
精密运动平台
产品详细介绍多轴精密运动平台:采用直接驱动电机,无丝杠传动,全伺服驱动。微光栅编码器作为信号反馈机制,有多种结构形式,重复定位精度1微米到10微米,行程可定制。 支承系统可选空气轴承、滚珠导轨、滚柱轴承等。速度快,最大速度5米/秒(300米/分),加速度大,最大加速度1G到10G可选。 主要应用领域:精密运动设备、精密测试测量、电子设备、数控机床、MEMS、医疗设备等。
北京慧摩森电子系统技术有限公司
2021-08-23
一
轴
齿轮(超速档)
德州齿轮有限公司
2021-08-26
31001轮
轴
模型
宁波华茂文教股份有限公司
2021-08-23
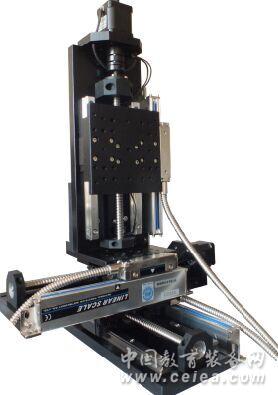
闭环三
轴
位移台
产品详细介绍名称: 三维高精度位移台 标准配备有步进电机和标准RS232接口,配合运动控制器可实现自动控制 进口高品质滚珠螺杆驱动,重复定位精度好,寿命长 新型轴端结构,防止螺杆松动,特别适合高速往复使用 导轨采用精密线性轴承导轨(两端支撑,中间悬空), 运动舒适,但承载较小, 适合单轴使用,垂直使用效果最好 步进电机和滚珠螺杆通过进口高品质弹性联轴节连接,传动同步且噪音小 配有手轮,方便调试 两端装有零位和限位开关,方便准确定位和保护产品 底座有标准孔距的螺纹孔和通孔,方便安装固定 可换装伺服电机,实现高速或轴向重载 产品技术参数名称:三维高精度位移台型号MZ3100栅光栅信号TTL信号行程(mm)100直线位移台输出位移分辩率 (mm)0.005直线位移台输出精度(mm)0.001直线位移台输出重复定位精度0.002光栅尺闭环控制软件控制光栅尺返回信息软件显示螺杆导程(mm)4标配电机(1.8度步进角)42步进电机中心负载(Kg)20重量(Kg)10 三维高精度精密闭环电动直线平台外形尺寸长:480mm宽:352mm高:352mm
容智科技
2021-08-23
首页
上一页
1
2
...
72
73
74
...
159
160
下一页
尾页
热搜推荐:
1
云上高博会企业会员招募
2
64届高博会于2026年5月在南昌举办
3
征集科技创新成果



 搜 索
搜 索