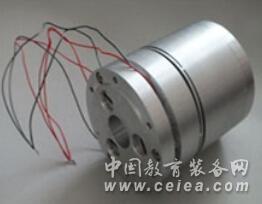
大推力压电陶瓷
产品详细介绍名称:大推力Z轴微动台 产品特点 放大机械体采用压电陶瓷驱动 采用有限元分析,优化结构尺寸 频率响应快,带负载能力大,结构简单 压电陶瓷分布位置为三点支撑,间隔120度,压电陶瓷具有防震设计,消除震荡对压电陶瓷损伤; 此产品为大推力结构设计,适用于输出力大的实际应用; 有限元分析,设计优化,用客可订制产品 用户可根据自己的应用不同可订制加工 结构体中间有通孔,安装初使位置有手动调节,具有安装定位口; 产 品 名 称:大推力Z轴微动台http://rznxkj.com/index.html型号 RH3KN零位移输出最大推力(驱动电压150V时) 3000N空载最大输出位移(驱动电压150V时) 60微米输出端摩擦片材料 7075超硬铝(表面不做化学外理,)输出端摩擦片 可更换驱动压电陶瓷数量 3支压电陶瓷具有手动预紧和微调输出端位移功能 3支均可调节压电陶瓷驱动电压 0~150 V压电陶瓷电容量 18微法响应频率(注:小信号峰峰值:Vpp >1V) 2K摩擦片数量 4片(含装配件)/材料: 7075超硬铝机体结构材料 7075超硬铝提供技术资料 包括CAD工程图,SolidWorks三维图,调试文件,安装与使用手册输出引线 BNC孔端连接器,线长1.5m外形结构尺寸
容智科技
2021-08-23



 搜 索
搜 索