高等教育领域数字化综合服务平台
云上高博会服务平台
高校科技成果转化对接服务平台
大学生创新创业服务平台
登录
|
注册
|
搜索
搜 索
综合
项目
产品
日期筛选:
一周内
一月内
一年内
不限
流化
床
谷物干燥设备
据联合国粮农组织的调查,全球性粮食因收获后干燥和储藏不当造成的损失约为5~10%;据经验估算和局部统计,在我国年产四亿多吨粮食中,因不能及时干燥入库造成的损失约有三千万吨。从某种意义上说搞好粮食的干燥和储存比耗费人力和物力去生产更多的粮食更有意义。此外,我国农业正向着集约化和机械化的方向迅速发展,特别是在我国的北方地区,小型收割机专业化大军随着季节由南向北进行快速专业化和机械化收割作业。但是,和专业化机械化收割技术相比,谷物的干燥还基本停留在场院或道路人工摊晒阶段,给粮食的安全入库留下了隐患。开发一种高效、节能、符合环保要求和安装移动灵活的谷物干燥设备配合机械化转业收割已成为社会和农业发展的迫切需要。
北京科技大学
2021-04-13
公寓
床
两连中梯
公寓床两连中梯:4500*900*2000mm,65*65*1.5,82*42*1.2mm(50*50*1.2,82*42*1.2mm)异形管,杉木床板,18mmMDF柜,上床下桌的设计,采用优质钢管通过高频焊接而成;床横梁采用插入式焊接,防止护栏断裂,增加牢固性和安全性;床梯采用防滑踏步式梯子,增强踏步防滑能力。
漳州建晟家具有限公司
2021-02-01
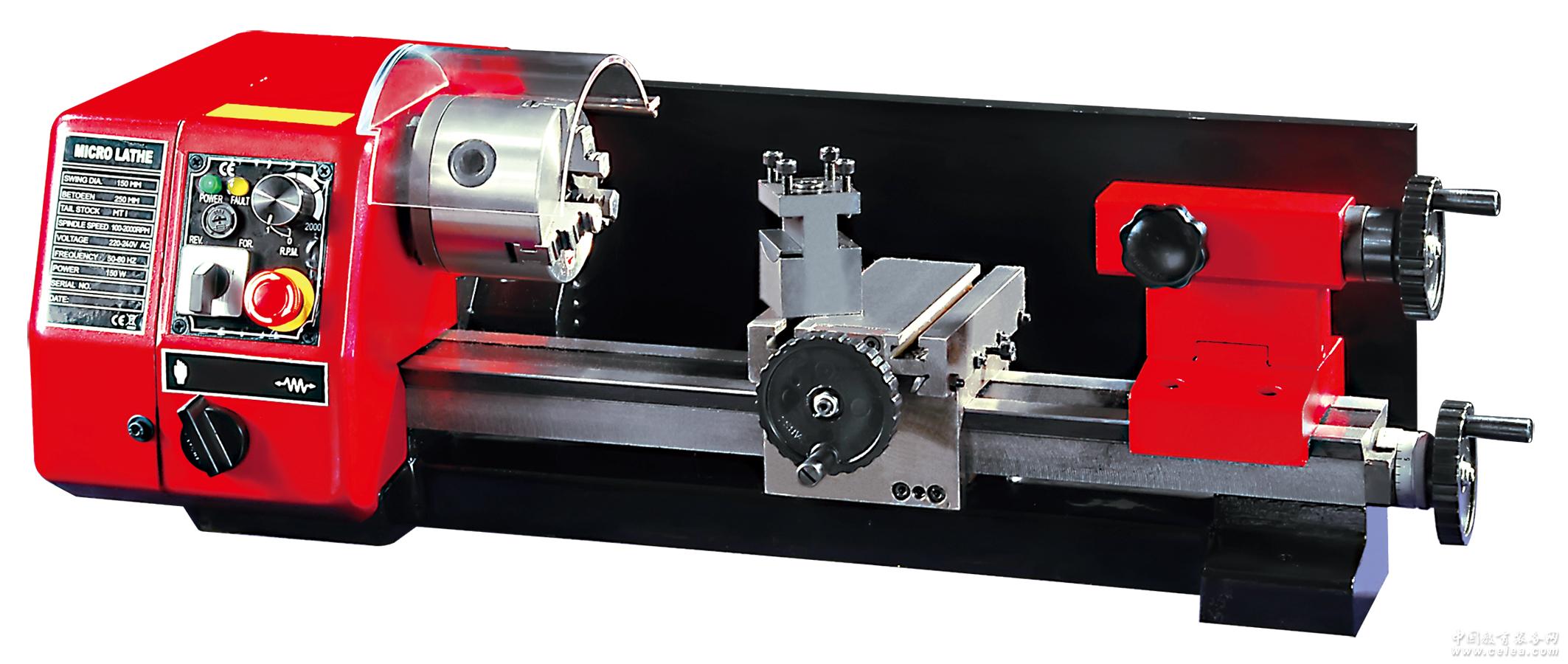
C1-250车
床
产品详细介绍小型车床,体积小,方面,家用。正品西马特机械,质量售后有保障!电话021-39118900 手机 18930047300 地址;上海嘉定区曹丰路555号 上海西马特机械有限公司
上海富沛森电子商务有限公司
2021-08-23
电动
十四针灸模型十四
电动
针灸模型
XM-85A电动十四针灸模型 XM-85A电动十四针灸模型(十四电动针灸模型)演示361个穴位及十四经脉起止经过(含经外穴),按下相应的按键,有灯光显示相关穴位。 尺寸:高85cm 材质:玻璃钢
上海欣曼科教设备有限公司
2021-08-23
一种肿瘤摘取
手术
钳
本实用新型涉及肿瘤手术工具,具体涉及一种肿瘤摘取手术钳,包括两个钳臂,所述钳臂的前部设有弧形钳头,所述钳臂内侧开有凹槽且两个钳臂的凹槽的开口相对设置,所述凹槽内设有剪臂,所述剪臂的前部与弧形钳头对应的位置设有刀片,所述钳臂与剪臂通过同一销轴铰链,所述剪臂通过销轴在所述凹槽内活动,所述剪臂的尾部长度长于钳臂的尾部,所述钳臂尾部外侧设有凸纹,所述钳臂尾部连接有把环。本实用新型提供了一种肿瘤摘取手术钳,相对于传统的手术钳,本实用新型具有手术钳和手术刀双重功能,通过钳臂和剪臂来控制,解决了传统肿瘤手术在切除时需要频繁更换手术工具的问题,大大增加了肿瘤手术的效率。
青岛大学
2021-04-13
管腔类
手术
器械清洗架
管腔类手术器械清洗架,涉及医疗辅助器械领域,包括车架、格栅、主水管、分水管和对接管,所述主水管竖直设置并与所述车架固定连接,所述车架内安装有多层格栅;每层所述格栅下固定连接有所述分水管,所述分水管呈T字或十字型且中部与所述主水管连通;每层所述分水管左右两侧分别竖直连接有多个对接管,所述对接管底端设置有增压滤头,所述增压滤头沉于所述分水管内部,所述对接管的进水孔设置于所述增压滤头表面;不仅能够批量高压清洗官腔类手术器械,并能避免水流内杂质/气泡堵塞管腔器械,保证水流冲击清洗力。
青岛大学
2021-04-13
血管介入
手术
机器人系统
针对血管介入手术操作复杂、可控性差、辐射时间长等难点,将机器人技术和血管介入手术有机结合,北京航空航天大学ITR研究中心和海军总医院神经外科共同研制出我国首台血管介入手术机器人系统,系统在机构设计、医学图像处理、手术规划、视觉注册、微小力觉感知等方面具有自主知识产权。如设计完成基于摩擦滚动原理的推进机构,可以快速、准确的将手术导管推进到指定位置,精度达到0.8毫米;首次将智能材料制成的微小力传感器安装在导管末端,使医生操作机器人手术过程中有了触觉,确保了手术安全,打破了国外同类技术垄断,填补了国内空白。经过研究人员的三年努力,已经顺利完成关键技术攻关、系统集成、临床动物实验,正在开展临床实验。 系统处于系统试验和运行阶段。开发出血管介入手术机器人系统样机,开展了动物临床试验,制订了临床手术操作流程。
北京航空航天大学
2021-04-13
人机协同
手术
操作机器人技术
本成果在技术上构建了“医生在环”的融合系统,可发挥医生的经验和监督特性,基于增强导纳的省力操控,同时结合输入力交互与虚拟约束,实现基于阻抗模型的高精度稳定柔顺控制,提高交互过程的稳定性,在以人机协同开颅,人机协同整形场景下设计人机协同开颅手术机器人与人机协同整形机器人,研究成果具有广阔的应用前景。 一、项目分类 关键核心技术突破 二、技术分析 对比当前的立体定位手术机器人,人机协同手术机器人具有更直观的操作方式、操作过程中更加安全并且可以实现的功能更多。学术界广泛认为人机协同手术机器人将是未来机器人的一个主流方向。另外,人机协同手术机器人更容易被医生、患者接受,推广难度更低。本成果在技术上构建了“医生在环”的融合系统,可发挥医生的经验和监督特性,基于增强导纳的省力操控,同时结合输入力交互与虚拟约束,实现基于阻抗模型的高精度稳定柔顺控制,提高交互过程的稳定性,在以人机协同开颅,人机协同整形场景下设计人机协同开颅手术机器人与人机协同整形机器人,研究成果具有广阔的应用前景。
北京理工大学
2022-08-17
裸眼3D
手术
显示系统
3D微创手术因其治疗手段的先进已是发展趋势并在迅速普及, 3D腔镜、手术机器人、显微镜手术等都提供了3D影像数据。但目前 医生大多通过2D屏或佩戴3D偏光眼镜观看,给主治医生带来:3D 空间还原不准确影响手术安全和效率、手术屏画面昏暗不清晰、眼 镜易产生雾气遮挡视线、长时间观看眩晕等问题。 班度科技基于“周期像素复用”的实时两视点转多视点技术,自 主研发的「裸眼3D手术显示系统」解决了现有技术的困境,实现了 具有正确空间遮挡关系的3D成像,为医生提供精准、快速的判断决 策依据,可极大地降低手术风险和提升医生的诊疗效率,降低低年 资医生的学习曲线和规培成本,提升基层医疗水平。既能减轻医生 负担,又实现了3D手术场景的完整还原,提高了手术安全性和效 率,带来逼真、清晰、舒适的高性能体验。
班度科技(深圳)有限公司
2022-06-14
电控
电动
AMT
Ø 成果简介:在民用16吨平头柴油载货汽车上,实现了换档操纵的全电自动化,各项功能满足载货汽车的功能要求。试验里程1万多公里,积累了大量的民用AMT使用、开发经验。试验表明:样机的软硬件已初步具备了一定的可靠性。由于执行机构全部采用了电机,相对于传统液压油缸执行机构而言不仅可靠性提高而且成本也得到降低,样机的性能价格比合理,具有良好应用前景。通过试验考核,民用16吨平头柴油载货汽车用电控自动变速操纵系统已经基本达到了使用的要求。它的使用性能、自动操纵功能、工作可靠性均已能初步满
北京理工大学
2021-01-12
首页
上一页
1
2
...
6
7
8
...
58
59
下一页
尾页
热搜推荐:
1
云上高博会企业会员招募
2
64届高博会于2026年5月在南昌举办
3
征集科技创新成果



 搜 索
搜 索