





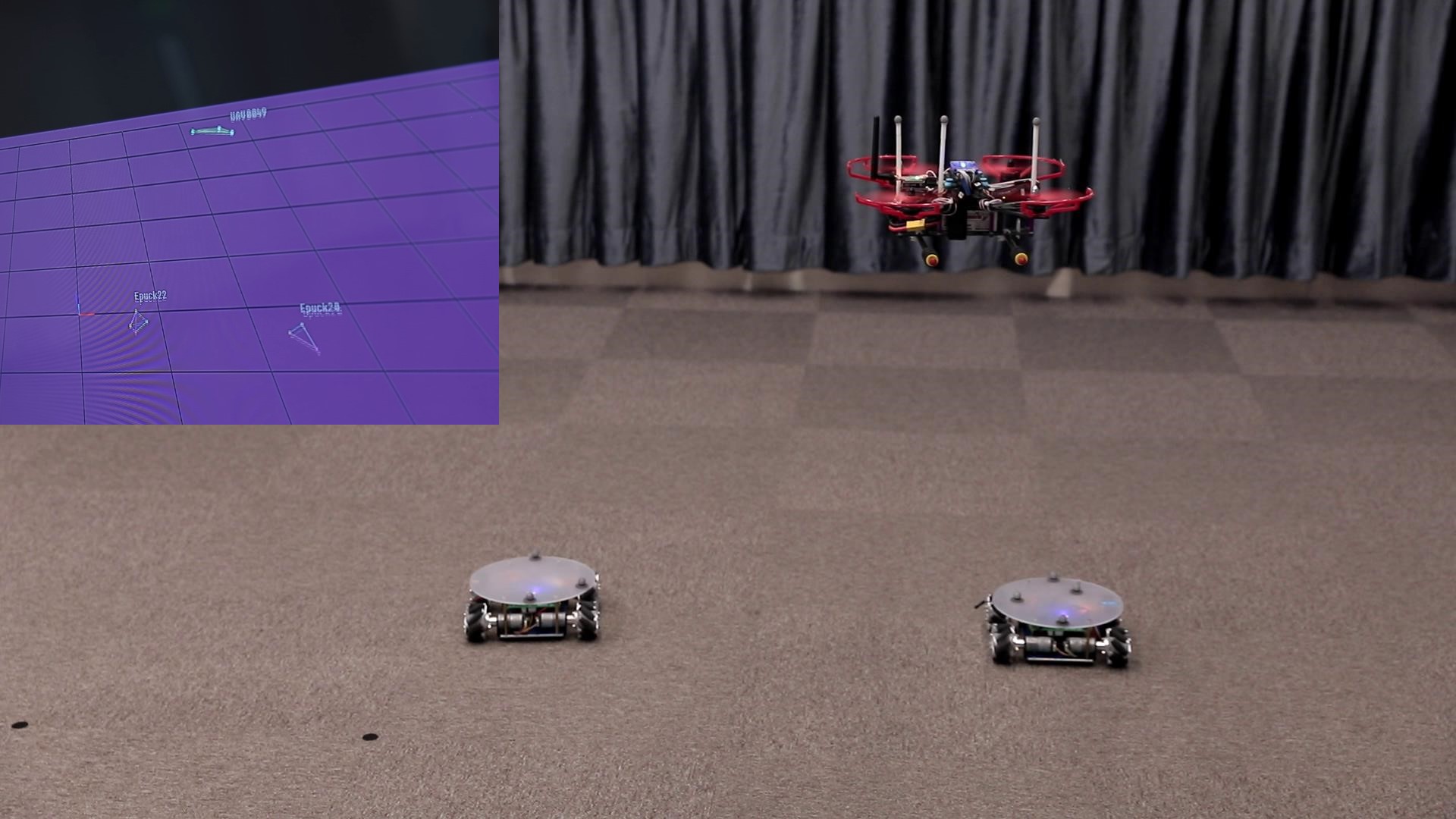







北京理工大学多智能体协同控制实验平台功能 • 无人机姿态控制 根据用户需求,自定义需要捕捉的部位,利用NOKOV精确捕捉运动物体的位置及姿态等三维数据。 • 无人机/无人车动态角色分配 根据NOKOV实时反馈的位置信息,使出现在随机位置的多智能体,以最短路径形成理想编队队形,为其他多智能体协同控制实验提供了基础。 • 空地协同编队、自主避障与跟随 由于设备的可拓展性,用户可随意增减目标数量,通过在软件内对目标进行命名等操作,来完成对大批量运动体的同时捕捉。 NOKOV(度量)光学三维动作捕捉系统功能 • 六自由度动作捕捉数据 采集三维空间XYZ坐标、六自由度(6Dof)、偏航角(Yaw)、横摇角(Roll)、俯仰角(Pitch)、欧拉角等数据,为无人机的位姿控制、运动规划提供连贯、流畅的动作数据基础。 • 亚毫米的定位精度 与采用GPS、航迹推算、全局摄像头、UWB等定位方法的实验平台相比,该平台的精度大大提高,可达亚毫米级。 • 丰富的二次开发接口 采集到的数据可以以VRPN形式传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink)等软件通信进行二次开发。 • 软件具有一键建立刚体功能,大幅提高工作效率
 产品分类
产品分类
