







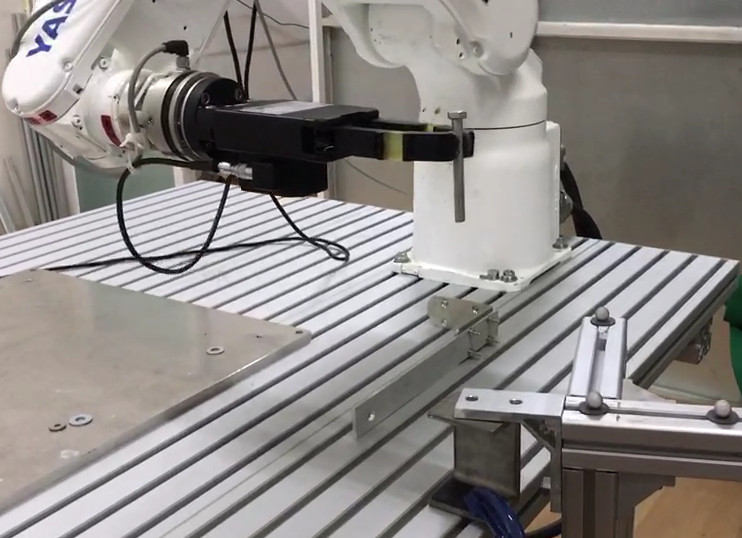

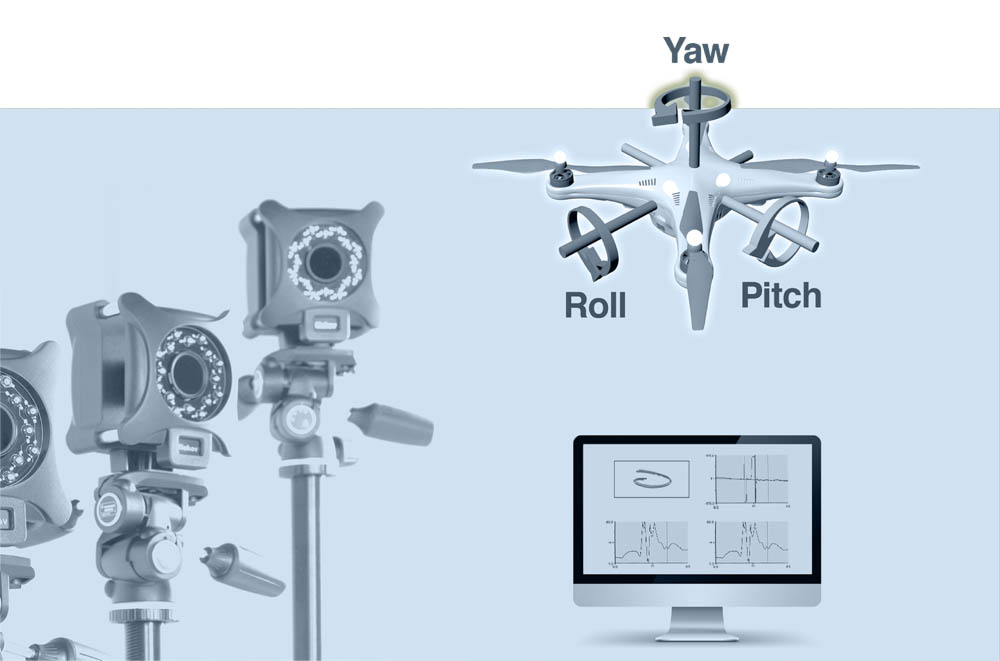
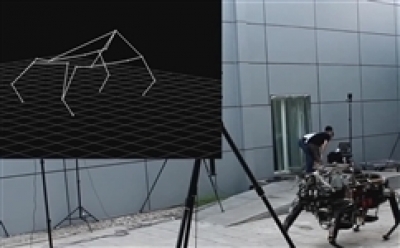
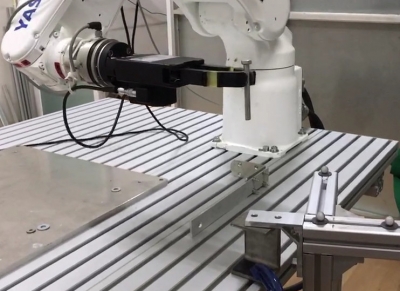





机器人无人机六自由度实时位姿采集与定位追踪 NOKOV可实现高精度实时室内定位与运动追踪,对六自由度位姿数据与关节角度等运动学数据进行采集。 得到的数据可以通过VRPN传输,或通过SDK(C++语言)端口广播与ROS、Labview、Matlab(包含Simulink) 等软件通信进行二次开发。 室内定位 • NOKOV(度量)光学三维动作捕捉系统可实时获取机器人和无人机精准位置、姿态和六自由度(6DoF)位姿数据。 • 即使是数百平米的超大实验室环境内,也能完成对单个/多个机器人或无人机的稳定的位姿采集与定位追踪,并实时输出位置与姿态数据。 多刚体结构定位 在机械臂、机械手、仿人机器人、仿生机器人、四足/六足机器人、外骨骼机器人、机器人化动力假肢等多刚体的研究中,NOKOV可实时 获取多刚体结构的关节角度与六自由度数据信息,并支持数据导出。 人体步态动作捕捉 NOKOV(度量)光学三维动作捕捉系统可采集人或其他生物的三维位置数据(三维空间坐标)、六自由度(6DoF) 的运动轨迹和关节角度、旋转、足跟坐标等运动学数据。基于整套系统超高的实时性,NOKOV可支持数据的实时可视化, 并可导出至第三方软件进行进一步的数据处理。 常见关节角度:头和躯干、上肢(肩、肘、腕、手)、下肢(髋、膝、踝、足)。
 产品分类
产品分类
