






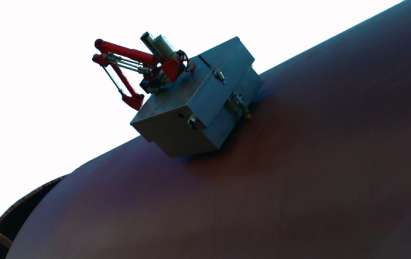


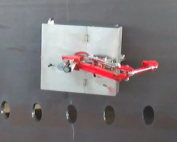






钢制壁面压力容器、各种钢制结构、船舶表面长期在高温、高压、腐蚀等环境下工作,存在材料的断裂和失效等问题。为保证设备的安全运行,需要对设备进行定期安全检测,钢制容器及船舶表面制造过程经常需要表面除锈、打磨和喷漆作业。现行的定期检测和表面制作多由人工借助各种工具及手段完成,效率低,工作强度大。根据爬壁机器人的工作环境,设计了一种基于永磁轮行走吸附技术的新型爬壁机器人,解决了钢制壁面容器爬壁机器人的灵活性不足以及吸附力不足的问题。机器人底盘采用柔性自适应机构,使机器人自主适应不同直径的钢制壁面,提高了机器人的壁面适应能力以及吸附可靠性。机器人前端机械手的设计采用平行四杆机构扩大了作业空间,夹持端安装多种夹持工具完成对钢制壁面的检测和除锈等工作。对爬壁机器人样机进行了综合性能试验包括机器人的现场试验以及机械手的负载试验,验证了爬壁机器人性能的可靠性。
产品特点与技术参数
①采用轮式永磁吸附方式,具有吸附可靠、灵活等优点;
②柔性自适应机构的底盘设计,实现了对不同直径钢制壁面的自主适应;
③能够实现对钢制容器壁面的除锈和检测等作业的远程自主控制,实现检测结果的远程处理;
④多功能机械手具有作业空间大,运动灵活等优点同时可夹持各种工具完成对壁面的维护等工作。
产品应用范围
爬壁机器人是移动机器人领域的一个重要分支,它把地面移动机器人技术与吸附技术有机结合起来,可在垂直及各种曲率不同钢制壁面上附着爬行,并能携带各种工具完成一定的作业任务,大大扩展了机器人的应用范围。目前,该爬壁机器人主要应用于核工业、石化工业、造船业、消防部门及侦查活动等,如对高楼外壁面进行清洗,对石化企业中的储料罐外壁进行检测、清理和维护,对大面积钢板进行除锈、打磨和喷漆,以及在高楼事故中进行抢险救灾等。