












PanoSim自动驾驶仿真测试软件介绍
PanoSim是一款面向汽车自动驾驶技术与产品研发的一体化仿真与测试平台,包括高精度车辆动力学模型、高逼真汽车行驶环境与交通模型、车载环境传感器模型和丰富的测试场景等,以及面向汽车自动驾驶软硬件开发的场景及交通流构建、车辆建模、环境传感器构建、虚拟实验台、动画与绘图等系列工具链,具有很强的开放性与拓展性,支持第三方的二次定制化开发,操作简便友好。
(1)支持MIL/SIL/HIL/DIL/VIL多物理体在环仿真:提供各类I/O接口可便捷地接入各类实时处理器、控制器、传感器、驾驶模拟器,以及包括车辆及其底盘和动力执行机构在内的各类软硬件系统,以满足自动驾驶研发在不同阶段、不同环节的实时仿真需求;
(2)支持ADAS/V2X和自动驾驶仿真开发与测试:支持包括汽车自适应巡航(ACC)、自动紧急制动(AEB)、车道保持辅助(LKA)、自动泊车(AP)、交通拥堵辅助(TJP)等在内的高级驾驶辅助系统(ADAS),以及其它自动驾驶技术与产品的仿真开发与测试;
(3)支持驾驶模拟体验、人机交互与人机共驾:支持高逼真度的驾驶体验,包括不同道路、交通和天气环境下的驾驶体验,ADAS功能和自动驾驶系统体验,支持人机交互与人机共驾系统的研发与测试等;
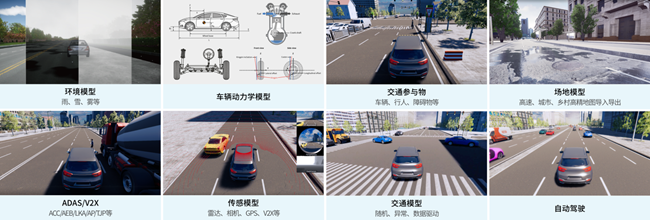
(4)支持自动驾驶感知/决策/规划/控制算法开发:集高逼真度道路与环境模型、交通流与智能体模型、传感器模型、车辆动力学模型等于一体,支持自动驾驶感知与决策、规划与控制等算法开发、模型训练和测试要求;
(5)支持多节点、分布式实时仿真:通过高逼真实时环境渲染、高精度传感器模型、分布式实时仿真架构、高算力、真实数据接口模拟等支持车辆真实EE架构下包括相机、超声波雷达、毫米波雷达、激光雷达等在内的多传感器分布式机群模拟,以及数据处理器、运动控制器、驾驶模拟器等在环的自动驾驶算法开发与测试;
(6)支持数字孪生测试与高并发云仿真: 支持虚拟环境下的道路、交通与气象模型,环境传感器模型等与真实世界车辆和车载软硬件系统的数字孪生测试;支持基于云平台的人-车-路-环境信息融合、云端一体高并发实时仿真;支持云平台下的实时在线学习与模型训练、自动驾驶算法的高效迭代与仿真测试等(以上系统功能见图3)。
