











1 基本概念
陀螺仪(
gyroscope)的原理就是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是
不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。我们骑自行车
其实也是利用了这个原理。轮子转得越快越不容易倒,因为车轴有一股保持水平的力量。陀螺仪
在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。
然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。在现实生活中,陀螺仪
发生的进动是在重力力矩的作用下发生的。
陀螺仪多用于导航、定位等系统,常用实例如手机GPS定位导航、卫星三轴陀螺仪定位。陀
螺仪基本上就是运用物体高速旋转时,角动量很大,旋转轴会一直稳定指向一个方向的性质,所
制造出来的定向仪器。不过它必需转得够快,或者惯量够大(也可以说是角动量要够大)。不然,
只要一个很小的力矩,就会严重影响到它的稳定性。
2 陀螺发展历史
1850年法国的物理学家莱昂傅科(
J.Foucault)为了研究地球自转,首先发现高速转动中的转
子(
rotor),由于惯性作用它的旋转轴永远指向一固定方向,他用希腊字 gyro(旋转)和skopein
(看)两字合为gyro scopei 一字来命名这种仪表。
18世纪欧拉建立的动力学方程和欧拉运动学方程,为陀螺运动的理论奠定了基础。但是制造
出一个实用的陀螺却经历了长时间的探索。19世纪中期,随着钢制外壳船舶的出现,原来所用的
磁罗盘不再适用,因而用陀螺导航的要求日益迫切。在第一次世界大战中,美国海军制成了陀螺
导航仪,并很快被其他国家所采用。随着航海和航空事业的发展,陀螺仪已成为不可缺少的精密
导航仪器。20世纪初出现了飞机的陀螺稳定器和自动驾驶仪。但直到1940年后,陀螺罗盘才完全
代替了磁罗盘,1950年出现了惯性导航系统。
不论制造得多么精密的陀螺,要完全消除轴承的摩擦力并使质心和支点重合是不可能的,因
而就会产生外加干扰力矩的作用,引起陀螺转子自转轴的缓慢进动,称为陀螺漂移。这时的进动
角速度称为漂移角速度。陀螺漂移角速度的大小是衡量陀螺精度高低的标志。为最大限度地减少
漂移,近代陀螺的研究课题主要是如何实现无干扰力矩的支承。主要途径是用电场力来代替支架,
实现无支承悬浮。如果转子是个标准的球形,则电场力通过其中心,从而实现无摩擦的悬浮。另刚体陀螺实验系统 GT300-3DT-ED
上海紫航电子科技有限公司 Tel:54170805 Fax:54170905
共 7 页 / 第 2 页
一个途径是用磁场力来实现转子的悬浮,但要求转子必须是用超导体制造的,才能使磁力线垂直
于球形转子的表面且不穿透它的表面。这就是近代电陀螺和磁陀螺的基本设想。
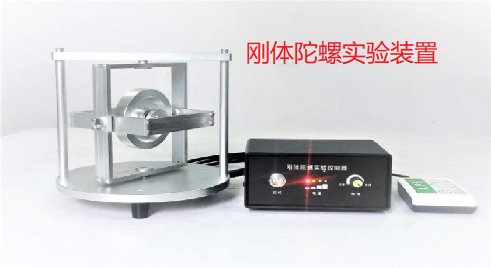
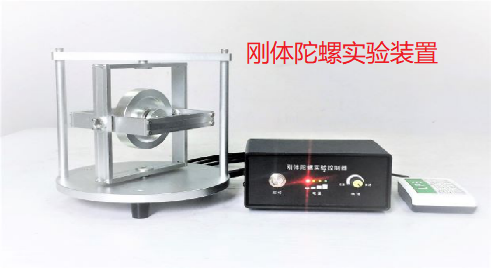
3 刚体陀螺仪结构
从力学的观点近似的分析陀螺的运动时,可以把它看成是一个刚体,刚体上有一个万向支点,
而陀螺可以绕着这个支点作三个自由度的转动,所以陀螺的运动是属于刚体绕一个定点的转动运
动。更确切地说,一个绕对称轴高速旋转的飞轮转子叫陀螺。将陀螺安装在框架装置上,使陀螺
的自转轴有角转动的自由度,这种装置的总体叫做陀螺仪。
图1 陀螺仪结构
陀螺仪的基本部件有:
1) 陀螺转子(常采用同步电机、磁滞电机、三相交流电机等拖动方法来使陀螺转子绕自转轴
高速旋转,并见其转速近似为常值);
2) 内、外框架(或称内、外环,它是使陀螺自转轴获得所需角转动自由度的结构);
3) 附件(是指力矩马达、信号传感器、控制器等)。
4 陀螺仪工作原理
陀螺仪,是一个圆形的中轴的结合体。而事实上,静止与运动的陀螺仪本身并无区别,如果
静止的陀螺仪本身绝对平衡的话,抛除外在因素陀螺仪是可以不依靠旋转便能立定的。而如果陀
螺仪本身尺寸不平衡的话,在静止下就会造成陀螺仪模型倾斜跌倒,因此不均衡的陀螺仪必然依
靠旋转来维持平衡。刚体陀螺实验系统 GT300-3DT-ED
上海紫航电子科技有限公司 Tel:54170805 Fax:54170905
共 7 页 / 第 3 页
陀螺仪本身与引力有关,因为引力的影响,不均衡的陀螺仪,重的一端将向下运行,而轻的
一端向上。在引力场中,重物下降的速度是需要时间的,物体坠落的速度远远慢于陀螺仪本身旋
转的速度时,将导致陀螺仪偏重点,在旋转中不断的改变陀螺仪自身的平衡,并形成一个向上旋
转的速度方向。当然,如果陀螺仪偏重点太大,陀螺仪自身的左右互作用力也将失效!。
而在旋转中,陀螺仪如果遇到外力导致,陀螺仪转轮某点受力。陀螺仪会立刻倾斜,而陀螺
仪受力点的势能如果低于陀螺仪旋转时速,这时受力点,会因为陀螺仪倾斜,在旋转的推动下,
陀螺仪受力点将从斜下角,滑向斜上角。而在向斜上角运行时,陀螺仪受力点的势能还在向下运
行。这就导致陀螺仪到达斜上角时,受力点的剩余势能将会将在位于斜上角时,势能向下推动。
而与受力点相反的直径另一端,同样具备了相应的势能,这个势能与受力点运动方向相反,
受力点向下,而它向上,且管这个点叫“联动受力点”。当联动受力点旋转180度,从斜上角到达
斜下角,这时联动受力点,将陀螺仪向上拉动。在受力点与联动受力互作用力下,陀螺仪回归平
衡。
5 实验原理
陀螺仪被用在飞机飞行仪表的心脏地位,是由于它的两个基本特性:一为定轴性(
inertia or
rigidity),另一是进动性(
precession),这两种特性都是建立在角动量守恒的原则下。
5.1 定轴性
当三自由度陀螺转子高速旋转后,若不受外力矩的作用,不管基座如何转动,支撑在万向支
架上的 陀螺仪自转轴指向惯性空间的方位不变,这种特性叫“定轴性”。如果我们以地球为基准,
则可以认为三自由度陀螺相对于地球运动,这种运动称为陀螺的假视运动或视在运动。视在运动
是陀螺稳定性的表现。
其惯性随以下的物理量而改变:
1)转子质量愈大,转动惯量I愈大;
2)转子旋转半径愈大,转动惯量I愈大;
3)转子旋转速度愈高,转动惯量I愈大;
5.2 进动性刚体陀螺实验系统 GT300-3DT-ED
上海紫航电子科技有限公司 Tel:54170805 Fax:54170905
共 7 页 / 第 4 页
在运转中的陀螺仪,如果外界施一作用或力矩在转子旋转轴上,则旋转轴并不沿施力方向运
动,而是顺着转子旋转向前90度垂直施力方向运动,此现象即是进动性。
进动性的大小也有三个影响的因素:
1)外界作用力愈大,其进动性也愈大;
2)转子的质量惯性矩(moment of inertia)愈大,进动性愈小;
3)转子的角速度愈大,进动性愈小;
而进动方向可根据进动性原理取决于施力方向及转子旋转方向。
6 实验系统性能
1)刚体陀螺仪
尺寸:200*200*200mm
重量: 1.6Kg
2)转子电机:直流无刷电机(双电机结构);
3)电机转速:0~6000r/min(可调);
4)电源
电压:DC +12V
电流:3A
7 实验系统特点
1)采用三自由度刚体陀螺结构,可进行完善的陀螺实验及演示;刚体陀螺实验系统 GT300-3DT-ED
上海紫航电子科技有限公司 Tel:54170805 Fax:54170905
共 7 页 / 第 5 页
2)转子电机采用高速无刷电机,转速平稳,寿命长;
3)转子采用双电机结构,保障了转子的对称性,并加大了转子驱动力矩,启动速度快;
4)配置有专用控制器,可以完成转子转速控制,方便实验;
8 实验操作
将刚体陀螺仪器平放在桌面上,仪器周转保留一定空间。
1)接通电源,打开开关;
2)设置转子转速:大、中、小;
3)启动陀螺,观察陀螺转子转速是否已经稳定;
4)定轴性实验
当三自由度陀螺转子高速旋转后,若不受外力矩的作用,不管基座如何转动,支撑在万向支
架上的陀螺仪自转轴指向惯性空间的方位不变,这种特性叫“定轴性”。
当陀螺转子高速旋转稳定后,手持基座分别绕刚体陀螺三个轴转动,观测刚体陀螺仪转子轴
的指向的变化。
分别改变转子转速大中小,观测陀螺转子轴的变化。
5)进动性实验
进动性是三自由度陀螺仪的一个基本特性。陀螺仪绕着与外力矩矢量相垂直的方向的转动,
叫做进动,其转动角速度叫做进动角速度。
进动角速度的方向取决于转子动量矩H和外力矩M的方向。外加力矩沿陀螺自转方向转动
90°即为进动角速度( )矢量方向。或者用右手定则记忆:从动量矩H沿最短路径握向外力矩M的
右手旋进方向,即为进动角速度方向。
通过控制器可改变转子飞轮正反转、转速,从而控制动量矩H的方向和大小,通过内框两侧
不同一侧加挂已知重量砝码,改变外力矩M的大小和方向,动量矩H为转子转动惯量和转速的乘
积,方向符合右手定则
进动角速度计算公式:ω=M/H sinθ
当θ=90°时,sinθ=1,所以
ω=M/H =M/Iωr
6)关闭电源,断开开关;刚体陀螺实验系统 GT300-3DT-ED
上海紫航电子科技有限公司 Tel:54170805 Fax:54170905
共 7 页 / 第 6 页
7)撤收仪器设备。
9 适用课程
惯性传感器原理、惯性导航原理、导航制导与控制、飞行控制原理、无人机实训实验、基础
力学、刚体力学、陀螺力学、理论力学、新型传感器原理及应用等。
10 注意事项
1)陀螺飞轮高速旋转时,不可用手触摸或试图阻止其转转;
2)实验系统工作时,尤其是陀螺转子处于高速旋状态下,必须有人在场;
3)刚体陀螺仪属于精密机械结构,操作中应当轻拿轻放,以免损坏设备。