




WRCAM焊接机器人编程与维护离线编程软件是根据《焊接机器人编程与维护职业技能等级标准》开发的一款焊接机器人离线编程软件。软件结合国内外工业机器人编程方法和指令的共性特点,结合焊接机器人编程的要点,软件采用通用性的离线编程操作界面与多品牌机器人数模导入,易学易懂易上手,是焊接机器人离线编程学习的基础。
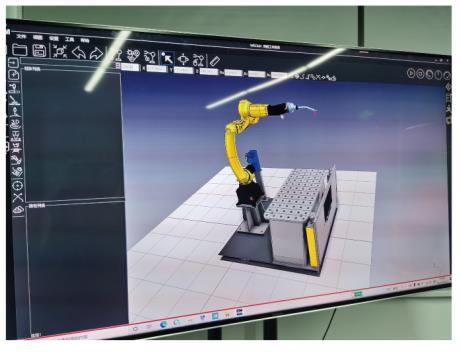
焊接机器人编程与维护离线编程是专业的软件,是利用CAD图形建立起机器人及其工作环境的几何模型,再利用一些规划算法。通过对图形的控制和操作,在离线的情况下进行轨迹规划。对编程结果进行三维虚拟仿真,检验编程的正确性,最后用后置处理器将生成的代码传到机器人控制器,控制机器人运动,完成计划任务。
WRCAM是完全自主可控的国产可扩展的离线编程软件平台,软件集成了大量全新的专利核心技术。软件具有强大的图形编辑环境,可对机器人单元进行离线编程和轨迹验证,支持焊接、切割、融覆、3D打印等多种工艺。