高等教育领域数字化综合服务平台






哈尔滨工业大学
工业和信息化部
- 31 高校采购信息
- 149 科技成果项目
- 4 创新创业项目
- 0 高校项目需求
光纤微探头式激光位移传感技术


所属领域:
项目成果/简介:
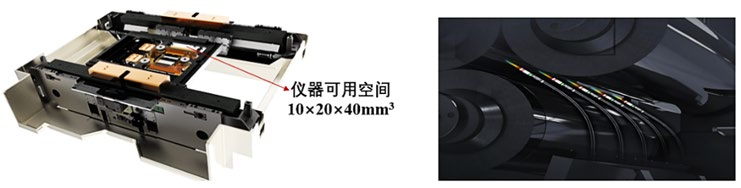
【成果简介】针对微传感头式超精密位移测量对体积极小、易嵌入、能在狭小空间中执行测量任务的迫切需求,研发了光纤微探头式激光位移传感技术与仪器装置。该技术旨在取代国外同类进口仪器,打破西方的垄断和封锁,推动国家超精密加工制造领域的快速发展。相关研究成果入选中国科协-科创中国先导技术榜单。
【技术指标】相较于传统测量仪器,独特优势在于:测头集成度极高、体积极小,易嵌入实验装置或精密装备中,可在狭小空间中执行测量任务;测头与主机仅通过单光纤连接,装调便捷且不引入热污染,易达成超精密测量目标。
【应用前景】该技术可广泛应用于高端装备制造、基础物理研究等领域,支撑传感式超精密测量需求,为我国高端装备研发提供嵌入式在线位移测量手段。
a)掩模板滑移测量场景 (b)纳米压印轴跳动测量场景

(c)运动位置测控 (d)光学形变监测 (e)卫星内部嵌入测量

扫码关注,查看更多科技成果
取消
确定