






- 89 高校采购信息
- 317 科技成果项目
- 1 创新创业项目
- 0 高校项目需求
单轨式铁路扣件自主拆装/检修机器人


项目背景:
现有铁路扣件拆装/检修工作效率低、作业一致性差作为铁路构成的重要的组件,铁路扣件检修市场规模巨大并持续增长。每公里大约需要7000套的扣件需要进行安装与维护,截至2023年,新建铁路所需扣件为7700万套,铁路维护所需要扣件达到3.5亿套。然而,现有铁路扣件拆装、检修等任务主要以人工与机械工具相结合,效率低、作业一致性差。同时已有的双轨铁路巡检结构由于扣件所需维护周期不一致等,导致扣件维修效率大幅降低。针对铁路扣件拆装和检修的需求,团队研制出了轻量化、紧凑型单轨式铁路扣件自主检修机器人系统,完成了单轨式移动载体平衡与稳定机构设计优化、弹条服役状态检测算法与装置、基于机器人技术的扣件维修工艺规划与控制等研究与功能实现。
解决方案:
单轨式铁路扣件自主拆装/检修机器人

技术特征:
1.单轨式检修车大负载动态平衡与稳定机构设计与优化
针对单轨式检修车在快速移动检测与静止操作过程中的结构平衡、负载稳定等需求,重点开展如下研究:
(1)移动机器人轻量化、模块化结构设计
(2)机器人载体快速行走平衡稳定与结构优化
(3)机器人在动态负载下的平衡结构优化
(4)机器人操作过程中的机-轨锁紧结构设计
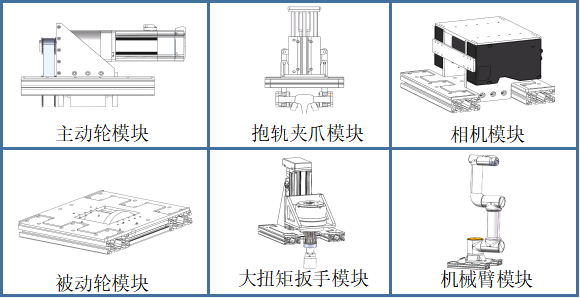
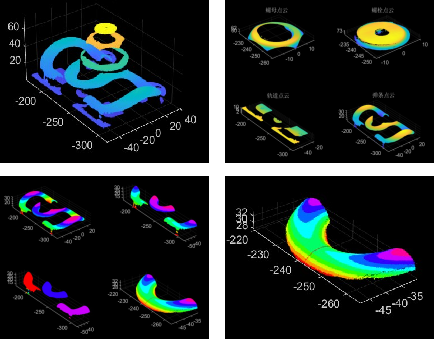
2.铁路扣件服役状态高精检测算法
(1)搭建铁路扣件多源输入的扣压力预测平台
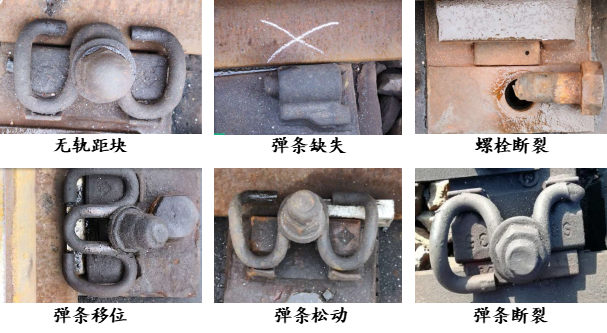
(2)基于二维图像的扣件服役状态检测
(3)基于高精度三维视觉的扣件形貌与扣压力映射关系建模
3.基于机器人技术的扣件维修工艺控制
本项目提出的单轨式移动检修车搭载6自由度机械臂对服役状态异常的扣件进行维修作业。
(1)针对扣件松动等情况,采用“扳手拧紧”的原位紧固机器人作业工艺
(2)针对扣件偏转、错位等情况,采用“扳手松开-机器人调整-扳手拧紧”的原位调整机器人作业工艺
(3)针对扣件断裂、弹条缺失等失效形式,采用“扳手松开-机器人拆旧-机器人装新-扳手拧紧”的换修机器人作业工艺
技术优势:
本项目所研制的单轨式铁路扣件自主拆装/检修机器人:
能进行螺栓拧松/拧紧、旧扣件回收、新扣件安装等精细化作业,弥补了现有大型铺轨作业设备无法进行精细化作业的不足;
提出的大负载动态平衡单轨车结构设计、扣件松紧预测算法、扣件拆装控制策略等方法极大提升了现有轨道交通装备作业性能;
具有轻量化、使用简单、携带便捷、成本低等优势,可面向铁路检修工务人员进行大面积推广应用、提高检修作业效率。

扫码关注,查看更多科技成果