





- 0 高校采购信息
- 6 科技成果项目
- 0 创新创业项目
- 0 高校项目需求
一种复合型无人潜水器


技术分析(创新性、先进性、独占性)
传统水下机器人主要有两大类:一种是无人有缆机器人,由于其受缆限制,通常用于定点取样和观察,探测距离有限;第二种是无人无缆机器人,主要用于长距离测绘作业,无法进行定点作业。
目前,上述两种机器人都有较为成熟的应用和商业产品。本项目提出的是一种复合型无人潜水器,综合了两种机器人优点,既可实现定点作业,又可进行长距离探测和测绘作业。目前,国际上仅美国有所研制,国内仅2家单位在研制,包括上海海洋大学。
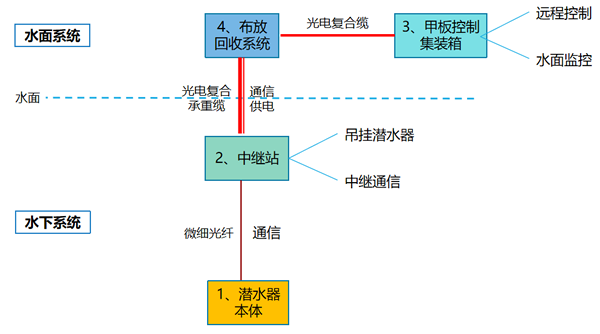
本项目由一个潜水器本体、一个中继站、一个综合控制系统和一套布放与回收系统四部分组成。各部分之间通过线缆连接构成完整的无人潜水器系统。
已研制复合型无人潜水器两台,其中第二台设备国产化率在90%以上;

本装置研制的初衷是用于全海深无人潜水器,但工程应用不仅限于此:
长距离隧洞和引水洞检测,可进行5km以上检测作业,突破现有技术瓶颈;
核电站涵洞检测;
海上作业应用;
前述第一种和第二种机器人作业的基本能力;
目前应用状态
上海海洋大学深渊中心研制的第一代和第二代全海深复合型无人潜水器已完成研制和全部试验工作,分别于2015年10月,2016年12月~2017年1月,2020年7月和2020年12月开展了海试,第二代全海深作业型复合无人潜水器完成南海和马里亚纳海沟测试,实现潜水器深海近底巡航、布放标志物以及定点沉积物取样等作业功能,最大深度6347米。海试作业已完成,下一步,是配合工程应用需求的改造作业。
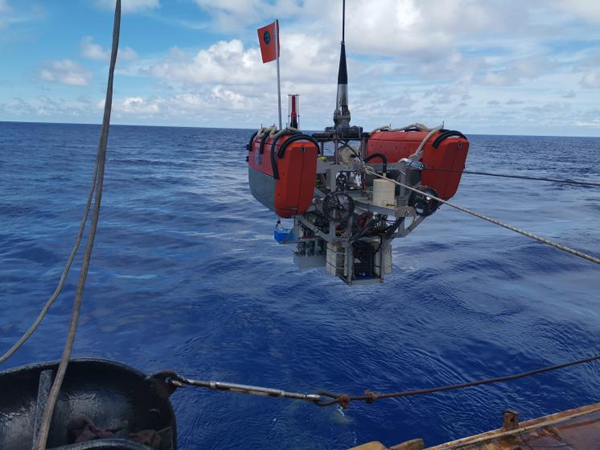
海上布放照片
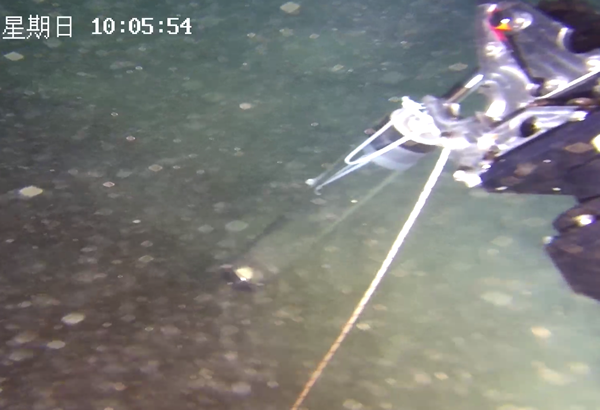
海底取样照片

海底生物照片
前景及经济社会效益分析等
目前该设备已初步具备各类工程环境应用的技术条件,稍加改造就可能实现工程应用。特别是该机器人特殊的作业能力,解决了现有机器人无法实现的功能,对于我们国家各类隧道、涵洞等长距离检测作业,突破了卡脖子的技术瓶颈,具有广阔前景。

扫码关注,查看更多科技成果