





- 187 高校采购信息
- 235 科技成果项目
- 0 创新创业项目
- 0 高校项目需求
遥操作排爆机器人


项目背景及意义
国内外反恐排爆形式日趋严峻,一系列的恶性暴恐事件,对社会和国家造成重大损失。因此,研发专用于爆炸环境的应急处置特种机器人,代替人进入有爆炸可疑物的危险场所中,通过场外人员的遥操作实时控制,完成对现场的搜索、探测和对可疑物的处理,减少排爆人员的伤亡。研究基于遥操作技术的排爆机器人操作方法,提高机器人的操作性能,增加排爆的成功率。同时,机器人的研制将带动相关行业领域自主创新和技术进步,提升我国排爆机器人装备在国际市场的核心竞争力,推动经济转型升级。
项目展示及介绍

本单位开发的遥操作排爆机器人由两部分组成:实物样机和控制系统,样机由机械臂、运动平台、控制箱组成;控制系统由操作人员的控制端和车载机械臂的执行端组成。样机机械臂由4+1个自由度组成,用于完成可疑爆炸物的抓取;履带型移动平台保证排爆机器人可以安全可靠到达操作环境,控制箱是控制排爆机器人各关节的“手柄”,通过控制面板上的旋钮、按键等控件完成排爆任务。排爆机器人样机是躯干、控制系统是大脑、控制方式是思维策略、通讯方式是神经,其中控制系统是本设备的研究重点。
本套设备选用国产控制器作为控制端和车载端的控制核心;选用无线通讯设备保证机器人可以在距操作者八百米仍可以正常工作;选用推杆和旋钮保证操作简便,控制可靠。使用上位机软件进行程序编写,通讯和控制方式主要是串口和CAN。
项目特点:
遥操作控制
排爆机器人采用的遥控操作方式,由操作人员在远端控制台控制机器人执行相关排爆操作,然后控制信号经远距离无线通讯系统传递给机器人机载接收机,进入控制器,控制机器人本体的机构运动,通信内容包括数据、视频、音频信息。
遥操作技术将排爆人员从危险的环境中解放出来,对于保护排爆人员人身安全具有重要意义。遥操作技术克服了传统线缆操作的局限性,可以保证一定的数据穿透能力。
多传感器信息融合
排爆机器人的工作环境较为恶劣现场非传统结构化已知空间,在机身及机械臂上安装了较多的传感器,用于检测机体及外部环境信息。融合多传感器采集到的信息,无损、安全传送给远端操作人员,为操作人员提供准确可靠的现场信息。提高排爆的成功概率。
排爆机械臂运动控制研究
此部分研究主要包括排爆机械臂运动学及动力学特性分析、排爆机械臂运动控制算法研究等。此部分的研究难点在于机械臂逆运动学的实时分析和多自由度机械臂末端运动的精确控制。
主要技术指标:
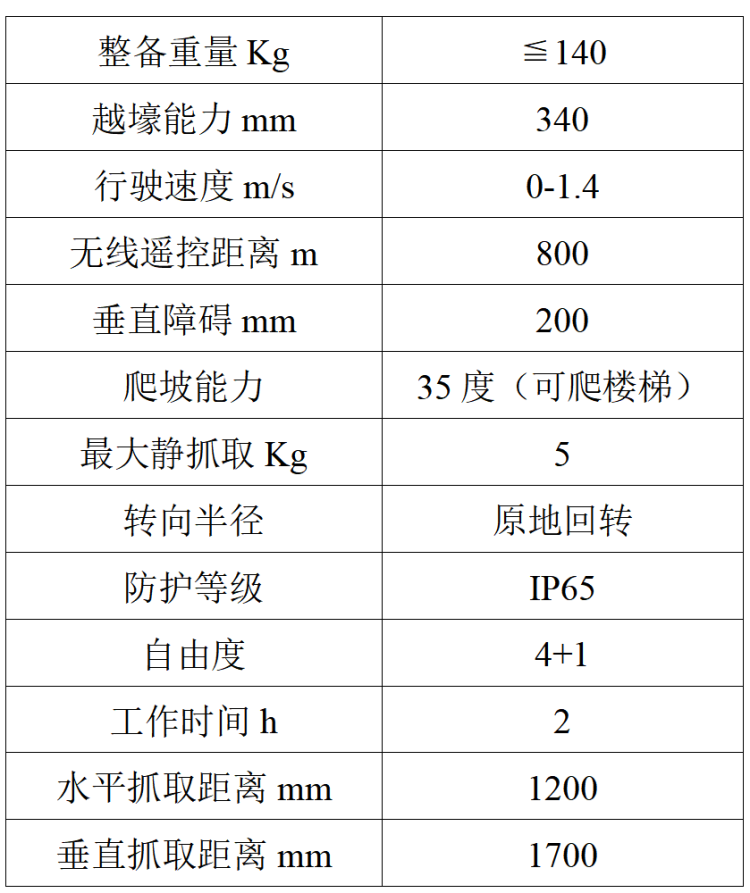
本项目产品属高端装备制造的特种机器人方向,主要应用目的为替代人工完成危险的搜爆、排爆工作。使用遥操作技术,将操作人员从危险的环境中解放出来,大大降低排爆人员在排爆过程中的心里负担,提高排爆成功率。

扫码关注,查看更多科技成果