高等教育领域数字化综合服务平台






北京工业大学
北京市
- 0 高校采购信息
- 383 科技成果项目
- 1 创新创业项目
- 0 高校项目需求
机器人工作空间轨迹规划控制方法
2021-04-13 00:00:00
云上高博会
https://heec.cahe.edu.cn
关键词:
机器人


所属领域:
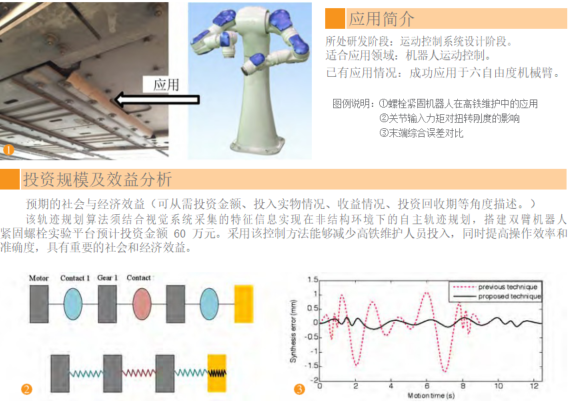
项目成果/简介:
分析说明国内外相关技术的状况和项目背景,项目基于什么,做了什么,形成了什么技术或产品, 主要创新点或优势(少写理论,多介绍成果,精炼易懂,300 字以内)。
高铁组基础设施中螺栓结构处处可见,大量螺栓松弛检测和拧紧工作依靠人工操作,不仅费事费 力且易漏检漏测,为了降低劳动强度、提高工作效率和准确度,需设计一种专用双臂机器人替代作业 者进行螺栓校验和紧固工作。项目包括柔顺轨迹规划控制、协同紧固操作控制及环境和对象特征提取 等诸多研究难点。
项目基于该需求已经在轨迹规划控制方面做了大量研究,其中建立了关节刚度模型,并提出了考 虑运动和动力约束下的轨迹优化方法,基于该方法能够对机器人实现快速、平稳、准确的轨迹运动控制, 从而达到提高操作效率和操作精度的目的。
项目阶段:

扫码关注,查看更多科技成果
取消
确定