高等教育领域数字化综合服务平台






上海交通大学
教育部
- 66 高校采购信息
- 213 科技成果项目
- 2 创新创业项目
- 0 高校项目需求
陆用惯性导航系统自动标定、运动对准及自主定位技术
2021-04-13 00:00:00
云上高博会
https://heec.cahe.edu.cn
关键词:
导航系统


所属领域:
项目成果/简介:
本技术涉及一种轮式车辆惯导系统的自动标定、运动对准即自主定位方法,即如何在不借助参考路标点和其他外部传感器如GPS的条件下,实现实际路况下的惯导系统与车体间安装关系和里程计标度因数的自动标定,以及车辆行驶中的惯导系统运动对准与自主定位,抑制环境因素对里程计辅助效果的影响,提升陆用车辆导航系统的自主性、快速性、可维护性、环境适应性和精度指标。
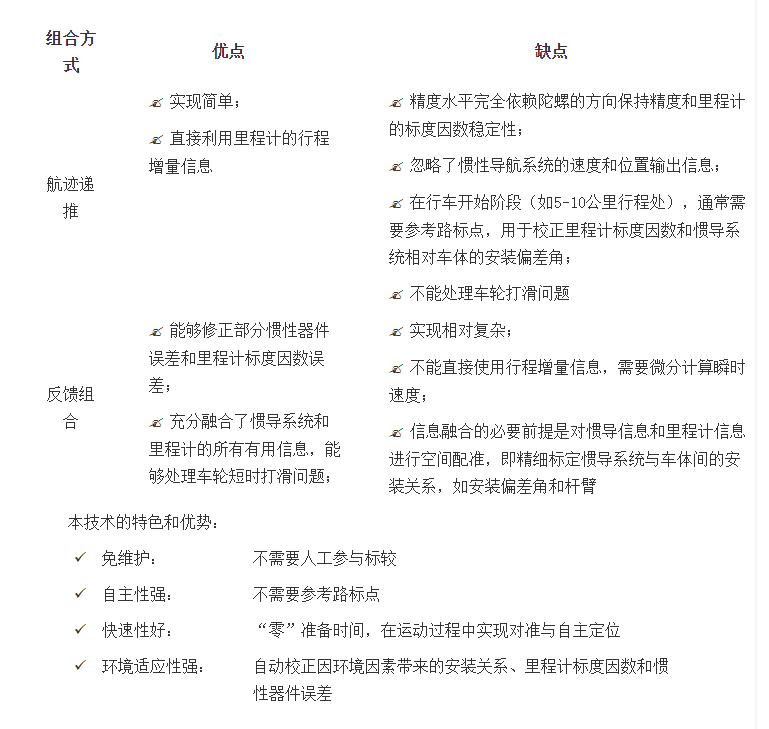
惯性/里程计组合导航系统通常采用两种组合方式:航迹推算方式和反馈组合方式。航迹推算方式是一种简单的次优组合,它以惯性导航系统提供姿态基准,以里程计提供行程增量并在参考坐标系中投影累加得到当前位置;反馈组合方式则将里程计输出作为惯导系统的独立外部观测,反馈校正惯导系统的导航参数误差以及部分惯性器件误差,同时利用惯导系统的短期稳定性修正里程计标度因数误差。下表给出了两种组合方式的优缺点对比。反馈组合方式具有航迹推算方式所不具有的很多潜在优势,如在信息空间配准的前提下,反馈组合方式能够抑制环境因素对惯性器件精度和里程计精度的影响,如不依赖外部路标点实现惯性器件误差和里程计标度因数误差的自我修正,并缓解车轮的短时打滑问题等。
项目阶段:

扫码关注,查看更多科技成果
取消
确定