高等教育领域数字化综合服务平台






浙江大学
教育部
- 223 高校采购信息
- 1313 科技成果项目
- 10 创新创业项目
- 0 高校项目需求
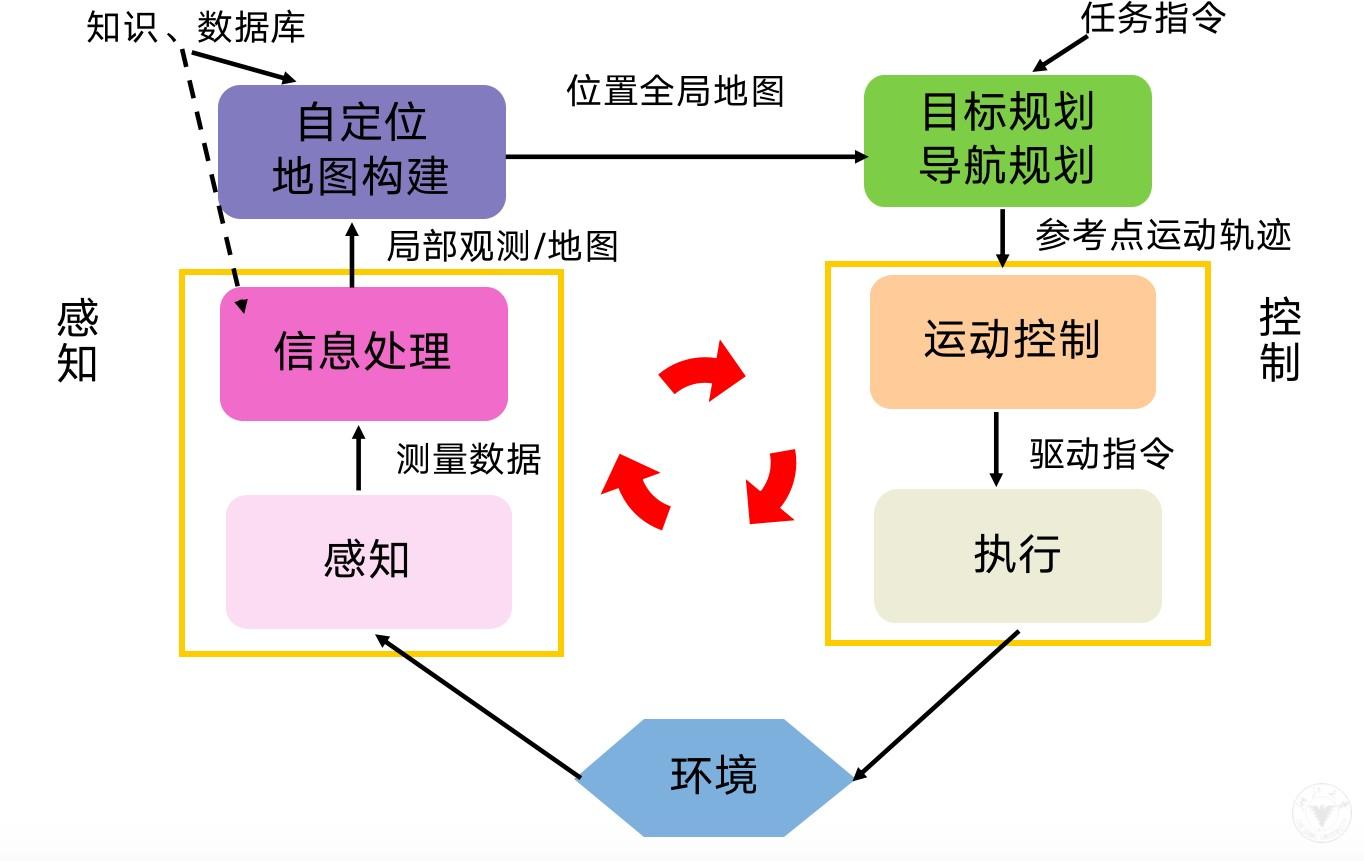
智能移动机器人


所属领域:
项目成果/简介:
在智能机器人领域迅速发展的背景下,移动型的机器人所展现出的智能化技术水平越来越高,这种机器人的应用范围和功能作用也越来越多。技术人员在现有技术能力和水平的基础上看到了智能机器人的巨大发展机遇和潜力,并开始潼憬和规划未来的发展蓝图对技术研发和应用现状也有了一个更为清醒的认识,并为将来智能化移动型机器人的发展不断进行技术的创新和进步,也将展望未来人工智能的发展前景。
浙大团队完成了传感器的标定工作,并且提出了环视鱼眼相机、轮速计陀螺仪融合方法,实现了基于环视相机和陀螺仪的融合估计;后完成了激光、相机、加速计和陀螺仪紧耦合的多传感器融合的里程计框架,叫UC-Fusion;还完成了先验激光地图和相机、加速度计和陀螺仪所构成的定位系。
应用范围:
智能制造
项目阶段:
成熟

扫码关注,查看更多科技成果
取消
确定