高等教育领域数字化综合服务平台






中南大学
教育部
- 24 高校采购信息
- 83 科技成果项目
- 0 创新创业项目
- 0 高校项目需求
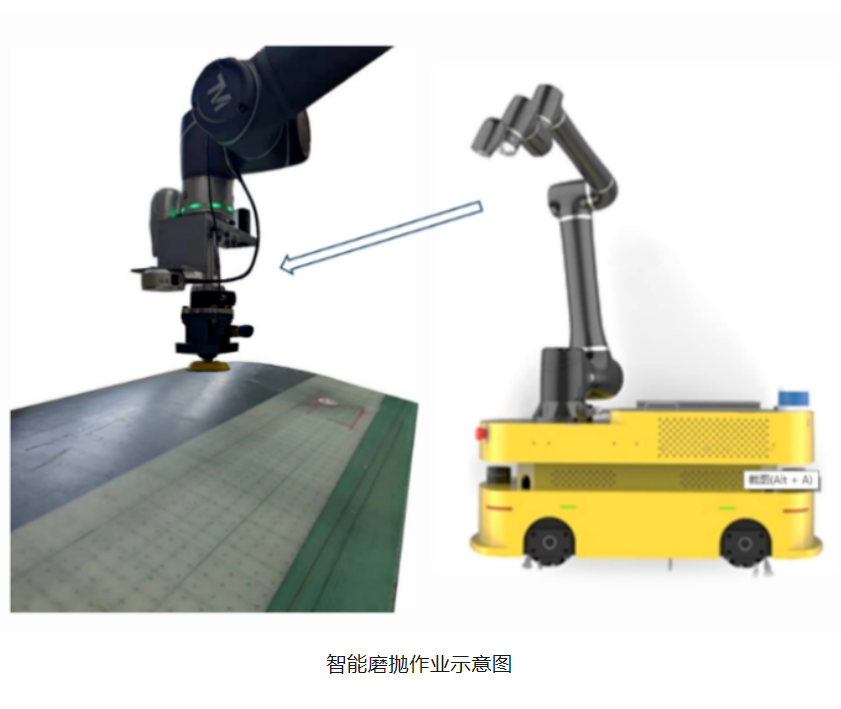
面向大型复杂曲面的移动机器人智能磨抛技术


所属领域:
项目成果/简介:
成果简介
成果包括:自主导航与控制技术、在线轨迹规划技术、打磨力柔性控制技术及打磨缺陷在线自动检测技术。实现了AGV全自动导航控制及在线规划机器人打磨轨迹,采用力控算法和姿态适应算法保证打磨力可控及曲面适应性。
成果开发了智能磨抛系统,集成了移动机器人运控与SLAM技术、多传感器融合的大型复杂曲面识别与磨抛路径规划技术、机械臂与打磨头融合的打磨力控技术及磨抛质量自动视觉检测技术。可实现复杂曲面零件的遥控操作及自动磨抛,改善人工打磨的工艺环境,保证打磨质量。
成果展示
应用范围:
成果可广泛应用于磨抛技术领域,特别是风机叶片、汽车车身等大型复杂曲面零件的磨抛。
技术成熟度:

扫码关注,查看更多科技成果
取消
确定