





- 16 高校采购信息
- 179 科技成果项目
- 1 创新创业项目
- 0 高校项目需求
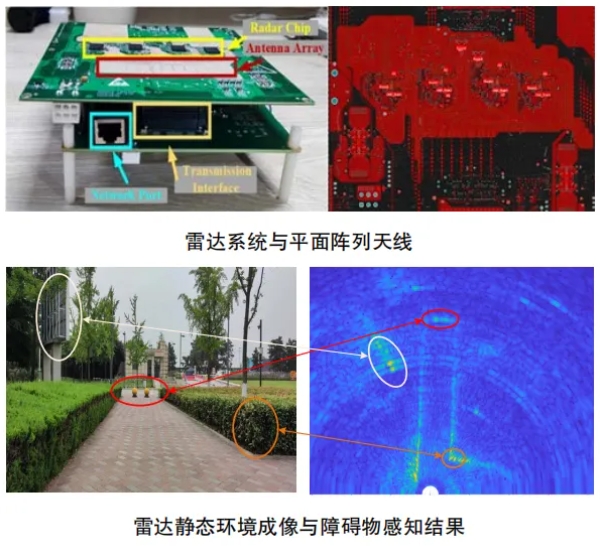
4D成像毫米波交通路况监测雷达系统


毫米波雷达产品主攻“智慧交通”应用领域,推出4D成像雷达应用产品,确立以核心器件“国产化”为指导的技术路线,工作频段80GHz,掌握智能交通检测雷达中的MIMO天线技术、射频微系统技术、数字信号处理技术、数据处理技术、4D近景成像算法、抛洒物障碍物检测技术等核心关键技术,提升产品在行业的核心竞争力,做到知识产权的完全自主、可控、创新。依托80 GHz 毫米波雷达信号处理、毫米波天线射频一体化综合设计等技术,即时、全面、精准地获取了目标的特征信息,更好地满足了智慧交通实时环境感知的需求。
研制具有5GHz可用带宽(主频:76GHz-81GHz可变)的4D毫米波交通雷达系统实现对城市道路和高速公路场景高精度感知。总体上具备对5m-600m范围内车辆探测能力,获取目标速度、距离和角度信息;对120米以内的环境和障碍物信息具备初步成像能力。系统可实时上传跟踪状态下的目标信息,包括目标距离、目标速度、目标运动方向、目标方位角、目标所在车道、目标ID 编号以及定位经纬度等重要信息。可实现对停止事件、逆行事件、行人事件、拥堵事件、机动车驶离事件等交通事件进行检测以及背景环境、大型障碍物的成像。
1.毫米波天线射频一体化综合设计
基于MIMO体制的毫米波阵列天线设计,重在解决系统总体对天线实现形式、阵列布局、天线增益、副瓣电平、隔离度等关键技术。同时,从射频电路的匹配、芯片的级联、PCB的布局规划、系统电源处理、模拟地与数字地的划分、信号回流路径、信号完整性等方面开展研究实现基于毫米波天线与射频SOC的一体化设计。
2. 4D高分辨信号处理技术与四维信息输出
基于FMCW毫米波三角波型,设计一个完整的毫米波信号处理流程,实现目标四维信息提取和输出。采用一次孔测定标法对不同天线通道的原始数据进行校准,消除由工艺带来的通道频率、相位和幅度误差;设计一种二维FFT的距离-多普勒功率谱生成和恒虚警检测方法,对校准数据处理实现目标距离和多普勒的检测和提取;基于恒虚警检测结果,提取不同天线通道数据,并提出一种基于假设检验的目标速度-角度联合估计算法,在不增加帧时间和帧数目的情况下完成目标速度解模糊和角度估计,最终输出目标速度、距离、方向角和俯仰角四维信息。
3.交通异常状况检测
基于目标跟踪、数字图像技术以及机器学习实现对停止事件、逆行事件、行人事件、拥堵事件、机动车驶离事件等交通事件的检测。
原理样机

扫码关注,查看更多科技成果