高等教育领域数字化综合服务平台






西安电子科技大学
教育部
- 16 高校采购信息
- 179 科技成果项目
- 1 创新创业项目
- 0 高校项目需求
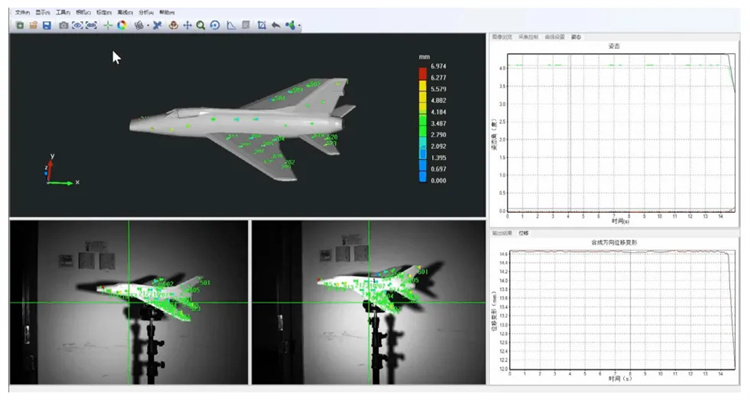
光学三维位姿在线监测系统 -DigiAMS


所属领域:
项目成果/简介:
视觉位姿测量技术在飞行器结构强度试验、飞行轨迹姿态测量中扮演着重要角色。通过视觉位姿测量技术获得飞行器在试验过程中的精确位置和姿态信息,并与其他试验数据,如载荷数据和应变数据等相结合,可以对飞行器的结构进行综合分析和评估,有助于揭示飞行器结构的强度瓶颈、预测疲劳寿命,并为改进设计和制造过程提供指导。本项目研究了基于CAD模型的物体三维位姿实时测量技术,实时解算出物体上包括质心在内的物体上任意一点的位置(三维坐标)及姿态(巡航角、滚转角、俯仰角)。
针对现有视觉位姿检测技术存在的标定操作过程复杂、现场测量基准构建难、实时性差及受遮挡影响大等问题,发展一种基于视频图像融合技术的复杂工况大视场相机柔性标定技术,实现有限空间内双目相机的快速、准确标定,提出一种基于CAD模型的测量基准坐标系构建方法,实现相机坐标系至基准坐标系的现场转换;建立一种关键点-CAD模型相融合的物体三维位姿在线实时测量方法,姿态解算速度达到70Hz,姿态解算误差小于0.05°,研制出光学三维位姿在线监测系统软硬件,从而为疲劳、静载或动载试验中飞行器三维位姿的在线、长时间监测提供技术与设备。
提出一种基于CPU-GPU异构计算的圆形非编码标志点在线实时检测技术,对于500万分辨率的视频图像,标志点实时检测速率达到100帧/秒、精度可达0.02个像素。(4)提出近景工业摄影测量与双目立体视觉技术相结合的大型工程结构三维位姿在线监测技术,高效、准确、非接触地获取被测物体的三维姿态及轨迹等信息。
项目阶段:
工程样机

扫码关注,查看更多科技成果
取消
确定