高等教育领域数字化综合服务平台






哈尔滨工业大学
工业和信息化部
- 31 高校采购信息
- 149 科技成果项目
- 4 创新创业项目
- 0 高校项目需求
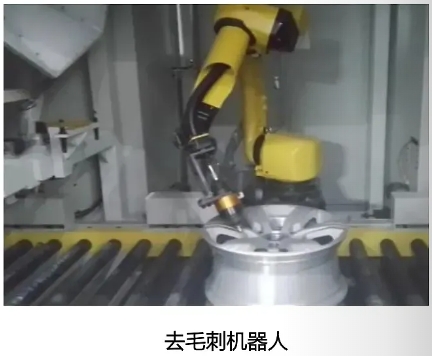
面向汽车轮毂去毛刺机器人


所属领域:
项目成果/简介:
针对汽车轮毂去毛刺替代人工作业的自动化问题,面向轮毂复杂形状、多品种、形变等挑战性因素,结合去毛刺工艺和制造特点,团队研发了机器人加工轨迹离线编程和在线优化系统装备。提出基于几何特征的轮毂视觉检测与定位、基于CAD图纸的轮毂加工轨迹快速编程和基于One-Shot在线优化等方法,形成了集视觉、运动和工业机器人的集成工作站,实现了轮毂检测、机器人快速离线编程和在线轨迹纠偏等能力,解决了铝合金轮毂自动混线去毛刺加工关键技术与装备研发。
基于2D视觉的轮毂型号识别与定位,识别成功率99.9%,定位精度0.2mm;基于2D视觉的轮毂窗口边线提取技术及机器人轨迹在线误差补偿,去毛刺节拍:40s~80s。

应用范围:
目前针对铝合金、铝镁合金铸造、锻造汽轮及摩轮窗口毛刺自动混线解决了机器人轮毂去毛刺自动化问题,可应用于车轮毂制造单位,已在杭州、河北和安徽等区域应用,有效提升了去毛刺效率和作业可靠性。

扫码关注,查看更多科技成果
取消
确定