





- 18 高校采购信息
- 350 科技成果项目
- 1 创新创业项目
- 0 高校项目需求
仿生鹰眼视觉相机


1. 技术特点:
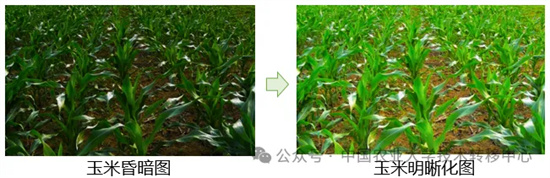
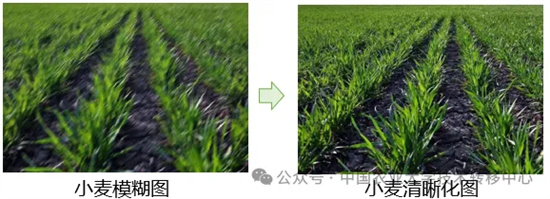
从结构仿生和功能仿生方面模拟鹰眼视觉结构和鹰眼视觉机制。结构仿生方面,模拟鹰眼双中央凹大视场成像设计仿生鹰眼视觉相机,仿鹰眼相机具有大视场和高分辨率的特点,以解决传统相机采集信息不全、采集效率低的问题;模拟鹰眼瞬膜和视杆细胞高质量成像,设计自动滤光片和自动补光灯,支持在正午阳光极强和夜间光线极暗环境下采集图像。功能仿生方面,模拟鹰眼视觉神经中枢信息增强机制,设计防抖算法解决因风扰造成无人机抖动,导致相机采集视频抖动的问题,以及基于维纳滤波算法解决图像模糊的问题;模拟鹰眼视觉自适应光适应机制设计鹰眼自适应光适应算法,解决因环境光线变化导致图像亮度不均问题,实现高质量成像。同时,考虑对目标的精准测距,模拟鹰眼视觉光流精准测距机制,训练DepthFM模型,提高深度相机测距的精准度。
2. 主要技术参数:
仿生鹰眼视觉相机由一个RGB相机,一个红外结构光深度相机,一个补光灯,一个自动滤光片切换模组构成。采用全局快门感应器,单个RGB相机视场角达120°,输出1280×720分辨率的深度画面。配置RK3588芯片作为边缘计算板卡主控芯片,该芯片具有“四核A76+四核A55”的八核CPU和ARM G610MP4 GPU,内置6 TOPs算力的NPU,算力满足不同计算场景。


仿生鹰眼视觉相机属于前沿仿生领域,在硬件和算法上均具有技术先进性。
1. 硬件先进性
仿生鹰眼视觉相机从结构上模拟鹰眼视觉结构,设计具有大视场、高分辨率特点的相机,克服传统相机视场角小,采集范围有限的缺点;同时,设计自动补光灯和自动滤光片,解决传统相机无法全时段工作的缺点。最后,仿生鹰眼视觉相机集成于高算力边缘计算板卡,满足不同任务的计算需求。
2. 算法先进性
仿生鹰眼视觉相机从功能上模拟鹰眼视觉机制,融合仿鹰眼视觉感知算法,实现高质量成像。同时,具有目标检测、全时段车牌识别、动态目标跟踪、动态路径规划、三维点云信息重建等前沿算法,以满足不同场景下的任务需求。
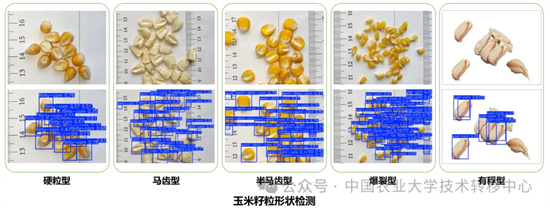
仿鹰眼产业化应用广泛,可用至育种机器人(跨垄式无人车和涵道式无人机)作物表型监测、采摘无人机果实识别、高速ETC门架车牌识别,羊群动态监测和计数。
1. 具有广泛应用场景
仿生鹰眼视觉相机可用至智慧农业(育种无人车、育种无人机,采摘无人机)、智慧畜牧业(放牧无人机)和智慧交通(高速ETC监控)等领域,具有广泛的应用场景。
2. 具有大视场、采集效率高的特点
仿生鹰眼视觉相机模拟鹰眼双中央凹大视场成像,具有120°大视场,在单次采集图像任务中,获得更多的目标信息,图像采集效率高。
3. 融合前沿仿生感知算法
仿生鹰眼视觉相机融入前沿仿生感知算法,可设置不同场景的解决方案。如模拟鹰眼自适应光适应机制设计鹰眼自适应光适应算法,克服图像光线变化对高质量成像的影响;模拟鹰高分辨率成像机制重建果园三维点云信息,以及模拟鹰眼视觉注意机制完成动态路径规划等任务。

扫码关注,查看更多科技成果