高等教育领域数字化综合服务平台






山东科技大学
山东省
- 0 高校采购信息
- 40 科技成果项目
- 0 创新创业项目
- 0 高校项目需求
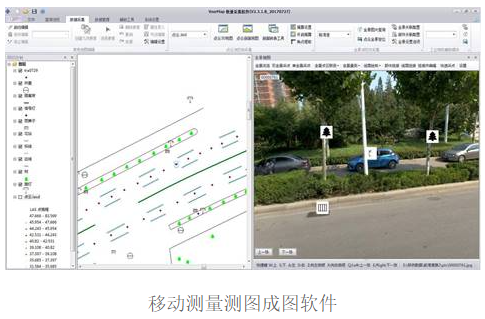
空地海多平台高精度移动测量系统
2021-04-22 10:30:16
云上高博会
https://heec.cahe.edu.cn
关键词:
测量系统


所属领域:
项目成果/简介:
近年来随着智慧城市、高精地图、无人驾驶等行业的快速发展,移动测量系统作为一种高新的测绘地理信息装备在测绘地理信息生产中的作用也日益突出,是当今测绘领域最前沿的科技之一。该传统集成了激光扫描仪、工业全景相机以及定位定姿等多种传感器,能够在移动状态下实时主动地获取近景目标的空间坐标、属性数据及实景影像等多种信息。
效益分析:
(1)创新点
1)多传感器一体化系统集成架构
多传感器系统集成、数据采集与控制,涉及到基于网络交互的模块间解耦,实现负载均衡,并利用插件式架构实现传感器的可扩展适配。
2)多传感器数据融合的并行运算
基于多线程机制实现I/O与数据运算间的并行,并通过多核CPU/GPU异构进行并行计算。
3)多传感器数据的一体化融合
基于特征约束(匹配)的多传感器一体化标定,涉及到基于平面特征的激光扫描仪的外方位元素标定以及基于特征匹配的无控制点全景相机外方位元素标定。
4)大规模点云数据的空间数据管理及实时渲染
基于八叉树结构实现内外存的点云空间数据管理,在此基础上基于点云数据实时预测调度和LOD结合对大规模点云进行实时渲染。
(2)性能指标
数据精度高:绝对位置精度优于3cm@50m;相对位置精度优于1cm@50m
数据融合质量高:真彩激光点云(影像融合精度优于1.5像素@15m)、可量测全景(5cm@25m)


扫码关注,查看更多科技成果
取消
确定