高温辐射热通量计TF-100
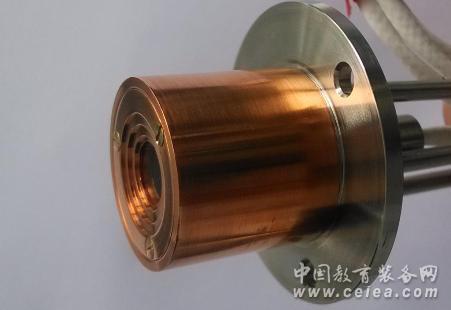
产品详细介绍高温辐射热通量计TF-100符合很多国际,国内燃烧测试标准要求,具有精确,坚固,测试重复性好等特点;可以高精度、快速测试总热流(对流热流及辐射热流)或者仅仅测量辐射热流。高温辐射热通量计TF-100采集频率可以达到50次/s,可以满足绝大多数辐射热流测试要求;通过专用软件通过USB接口,接电脑直接监控、处理数据。高温辐射热通量计TF-100的适用范围:火灾、燃烧试验高炉、锅炉热流测量引擎、发动机热损失测量航空和空间科学激光、爆炸等热流测量高温辐射热通量计TF-100的参数:热流范围: 0-2MW/m2(可选)采样频率: 50次/秒 – 2次/天测试通道: 1个储存数据: 2百万电池使用: 大于30天传感器最高温度: 200°C主机温度: -25 / 65°C热流精度: ±3%线长: 热流传感器2m组件: 主机、辐射热流传感器软件: 兼容WINDOW系列(计算机不包括)
上海图新电子有限公司
2021-08-23



 搜 索
搜 索