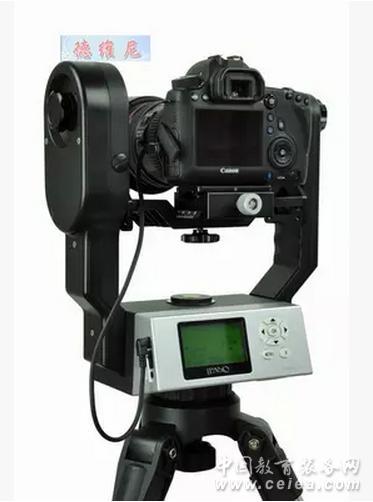
iPano Pro 360度全景云台
产品详细介绍 一.简介Allview Pro是最新研制的专业级智能全景高精度电动云台,旋转位置分辨率可达0.01度。适用于各种单反相机高达上百亿像素的矩阵摄影, 360度环形全景摄影以及360度球形全景摄影。也可用于延时摄影(TimeLapes)高分辨率转台,或配合滑轨使用。Allview Pro 外形美观,设计精巧,结构合理,采用稳定性远好于L型支架的U型支架,可靠性高,承载性好,节点调节方便,机械旋转系统多 达14个轴承,自动消回差设计,永无磨损烦恼,易于使用。控制界面图形化,可选中文或英文。由于采用低功耗设计,整机续航时间超长,是 国外进口同类产品的两倍。 Allview Pro 可通过RS232通讯接口与计算机相连直接固件升级,也可直接由计算机全功能控制操作,也可通过无线WIFI, 由笔记本, iPad 或iPhone手机全功能控制操作。也可以多台组网联拍。二.性能参数 1. 工 作 方 式: 全景/转台两用 2. 云 台 自 重: 3.3 kg 3. 最 大 载 重: 全景5 kg (相机加镜头) / 转台10kg 4. 体 积: 28 x 30.3 x 13.3 cm 5. 运 动 范 围: 方位360度,俯仰 + 90度到 - 90度 6. 适 用 机 型: 镜头中心到相机底部小于80 mm所有单反相机 7. 相机放置方式: 横置或竖置 8. 结 构: 双臂(U形)全封闭 9. 架 体 材 质: 铝合金10. 驱 动 电 机: 步进电机11. 运动分辨率: 0.0001度/步(位置分辨率0.01度) 12. 最大回转速度: 15度/秒(方位),8度/秒(俯仰)13. 运 动 方 式: 双轴同时14. 传 动 方 式: 蜗轮蜗杆(金属)15. 回差(间隙): 零(消间隙)16. 运 动 抖 动: 无17. 内 置 电 池: 7.4 V 4.4 AH可充电锂电池18. 续 航 时 间: 连续拍摄大于50000张(1张/每秒的条件下) 19. 显 示 器: 128 x 64 点阵LCD20. 矩 阵 选 择: 对角任意21. 快 门 线: 7根(佳能 N3,佳能 E3,尼康 10针,尼康MC-DC2,尼康MC-DC2, 尼康MC-DC1,Olympus RU-UC1,SONY RM-S1AM)22. 远程触发接口: 2.5 mm三芯插座23. 无 线 通 讯: WIFI全功能控制24. 通 讯 接 口: RS232 RS48525. 软 件 升 级: 用户可固件升级26. 上位机控制: 上位机控制面板27. 背 包: 标配 IPANO Allview Pro智能电动全景云台,具有强大的延时摄影功能,可以自由设定起始位置、拍摄张数、间隔时间、每张间隔角度,还可以在延时拍摄时实现包围曝光。使用IPANO电动云台拍摄的扬州市文昌阁的延时作品:视频地址:http://www.tudou.com/programs/view/_gx66mFzAoI/ 使用IPANO电动云台拍摄的安徽歙县坡村的星空延时作品:视频地址:http://www.tudou.com/programs/view/NfCHzYzT3p8/PC端无线控制软件,iPano Commander.exe下载地址:http://pan.baidu.com/s/1o6DZNJWAllview Pro 最新固件:AVP_20150629.bin下载地址:http://pan.baidu.com/s/1c0yfjNi
德维尼(北京)科技有限公司
2021-08-23



 搜 索
搜 索