GTT-25系列辐射热流传感器
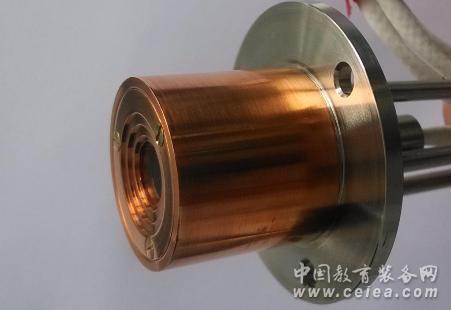
产品详细介绍GTT-25系列辐射热流传感器来自航天技术,采用经典的圆箔式设计,测量圆形箔盘中心和圆周之间的温差形成一个温差热电偶。标准箔盘由康铜制成,热沉由铜制成。这些材料产生一个与吸收热流成正比的输出。通过水的移除不断吸收热量。GTT-25系列辐射热流传感器特点:水冷系列,连续制冷,可以长时间测量,无暴露时间限制;输出的是线性信号,输出不受温度的影响;测量量辐射热流及对流热流测量精度高,精度优于3%GTT-25系列辐射热流传感器应用:高炉、锅炉热流,锅炉、燃烧室动力输出高温热源的标准化,高温热源的辐射热流(激光、爆炸等…)测量引擎、发动机热损失测量,燃烧室热流测定,火箭、喷气发动机动力输出航空和空间科学火灾、燃烧试验及其防护设备性能试验过程控制(在极端条件下,如:玻璃制造、火焰、炉窑等)GTT-25系列辐射热流传感器技术参数:标准直径: 25mm(其它尺寸可定制)标准长度: 25mm(其它尺寸可定制)可选量程: 2000,1000,500,300, 250,200,150,100,50,20,10,5,2(kW/m2)精度: ±3%
上海图新电子有限公司
2021-08-23



 搜 索
搜 索