杭州松下投影机维修 浙江松下维修点
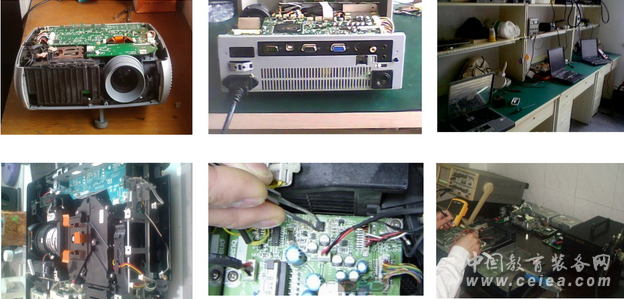
产品详细介绍杭州松下投影机售后维修服务中心(电话:15958016045)是浙江省松下投影机的专业维修中心。中心服务浙江省内所有地区的松下投影机用户,为其提供松下投影机的电源、主板、高压板、液晶板、色轮以及灯泡、镜头等所有零配件的更换与维修服务,并提供投影机光通道清洗服务。长期以来,中心为浙江大学、浙江工业大学、杭州师范大学等多家高等院校提供投影机维修与灯泡更换服务,并与他们建立了良好的合作关系。 现在正值暑假期间,中心针对各大中小学校特别推出更换投影机灯泡或者维修投影机一律提供免费清洗一次的服务,对在杭州市区的学校,中心还提供免费上门检测服务。如果投影机比较多都需要一次性做维护的,中心还可以提供上门服务,不管是不是在杭州市区。欢迎来电祥谈! 联系电话:0571-89938083 发布人:方冬水联系方式:0571-89938083
杭州亿成投影设备维修中心
2021-08-23



 搜 索
搜 索