






- 0 高校采购信息
- 30 科技成果项目
- 0 创新创业项目
- 0 高校项目需求
无人驾驶导航平台


在现代农业种植中,传统的作业车多依赖于轨道和人工遥控模式,这种方式不仅限制了作业车的工作精度和效率, 还增加了人工干预成本。随着精准农业和工业智能化、网联化、自动化的方向发展,农业市场对更加高效、智能的作业车辆需求日益增长。尤其是在复杂的环境中(如大棚),精确的导航和远程操作变得尤为关键。目前市场上的自主导航技术,如GPS或AGV导航系统,往往在精度和适应性方面存在局限,特别是在室内多障碍物的环境下。这些技术的不足限制了作业车的自动化和智能化水平,进而影响整个农业生产效率。
目前农业无人车需求呈现多样化和场景化的发展趋势,但行业内无人车多是与导航功能物理绑定,难以实现导航的模块化。
基于该平台可孵化丰富多样的垂直领域产品,如大棚打药、安防巡检、物流运输等。目前团队开发的垂直产品包括大棚的自动化打药和病虫害巡检机器人;母猪养殖智能化巡检及运输机器人(母猪健康巡检、发情期巡检和饲料运输)。未来,云端平台将开放集成和部署外部的神经网络模型功能,以进一步丰富巡检功能。此外,该导航平台可通过SLAM技术建立室内地图,并基于地图实现用户行驶路径的设置、行驶定位的展示和障碍物预警。

无人导航平台目前已搭载至多种农业作业车辆
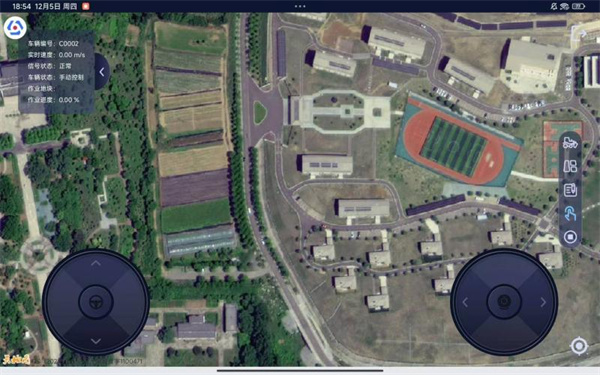
无人导航平台移动端操作界面

无人割草机全覆盖式路径规划示意图

无人驾驶导航平台应用场景
室内导航与软件控制产品已完成开发,具备量产能力。
我们开发的农业无人车导航基础平台创新性地实现了导航功能模块化、独立化,实现了导航功能与业务终端的快速集成、可扩展及高度的定制化功能(即在外挂式导航的基础上进一步实现了可定制的业务云平台功能)。无人车导航基础平台包括3端:定位端、云端和移动终端。其中,定位端可集成至任意移动平台(如无人车),仅需在移动平台上加装UWB定位标签/激光雷达(室内)或RTK接收器(室外);云端提供模型部署、路径规划和指令交互的功能;移动终端(App)实现导航控制、业务功能控制和用户交互的功能。用户通过移动终端指定行驶路径,云端服务器规划导航路径并下发指令至无人车,无人车按照预置线路行驶,同时配合上层应用如巡检、打药等。云端服务器可部署不同检测模型以实现相应的业务功能,移动终端(如手机APP或iPad)可实现无人车的远程遥控行驶、指定路线的交互、巡检视频展示、模型监测告警、业务功能控制等。

扫码关注,查看更多科技成果