





日前,西北工业大学航海学院“自主水下航行器团队”,在国际著名期刊《Nature Communications》上发表了题为“Body Orientation Change of Neighbors Leads to Scale-free Correlation in Collective Motion”的原创性研究成果。西北工业大学“自主水下航行器”团队是中国工程院院士徐德民教授创建,由中国工程院院士宋保维教授担任首席科学家,国家级领军人才、国家级教学名师潘光教授担任负责人。团队已先后被授予首批“国防科技创新团队”、首批“全国高校黄大年式教师团队”、首批陕西省“三秦”创新团队、西北工业大学首批科研育人示范团队,获“全国教育系统先进集体”等荣誉,为我国军民两用海洋装备建设和创新型人才培养做出了重大贡献。论文的第一作者为航海学院在读博士研究生郑志成,通讯作者是西北工业大学彭星光教授,西北工业大学航海学院是该论文的唯一通讯单位。
近年来,生物集群行为中的信息传递与协调机制为自主无人系统的设计带来了重要启发。尽管已有大量研究尝试通过建立个体间的交互机制来复现灵活的群体运动,但这些机制通常假设个体具备全知全能的理想化感知能力。然而,在水下无人集群系统中,受限的通信条件极大地增加了集群个体获取邻居运动状态的难度。如何仅依靠简单的视觉感知,而无需依赖复杂的传感器和通信设备,在弱通信约束环境下实现可靠的群体快速响应,已成为水下无人集群系统协同控制亟待解决的核心挑战之一。
团队针对这一热点研究问题开展了涵盖生物数据实证分析、交互机制理论建模及机器验证的全链条研究。通过从第一视角分析鱼群集体转向的轨迹数据,发现身体朝向变化更显著的个体通常在转向过程中扮演领导者角色,对群体方向的快速调整起到了关键作用。基于这一实证分析,团队设计了一种基于邻居身体朝向变化的局部交互模型,通过优先响应身体朝向变化显著的邻居,不仅可以在群内高效传递方向信息,使群体快速而准确地完成避险任务,还能促使群体自发涌现出尺度无关协同的宏观现象。最终,成功将该机制应用于由50台微型轮式机器人组成的集群,展现出高效的群体响应能力。这一发现为构建低成本、高性能的水下无人集群系统提供了新质感知要素。
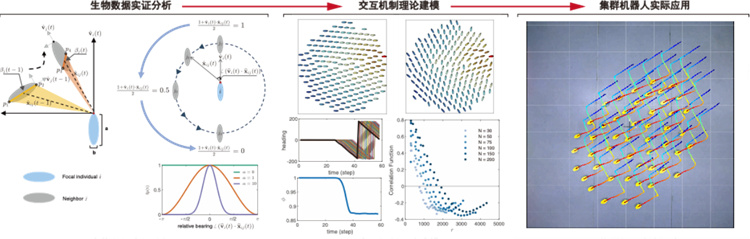
图1 生物数据实证分析、交互机制理论建模及机器验证的全链条研究