高等教育领域数字化综合服务平台
云上高博会服务平台
高校科技成果转化对接服务平台
大学生创新创业服务平台
登录
|
注册
|
搜索
搜 索
综合
项目
产品
日期筛选:
一周内
一月内
一年内
不限
三
轴
力测量系统
在风洞模型实验、航天器陆地模拟测试、船舶工业遥感测控和汽车工业测试等领域中对不同测点三轴向支座反力进行测量时,三轴力测量系统有着广泛的应用。不同领域中对系统量程、频率特性、抗干扰特性等需求并不相同,本项目针对具体工程需求研发了一套三轴力测量系统。
西安交通大学
2021-04-11
31001轮
轴
模型
宁波华茂文教股份有限公司
2021-08-23
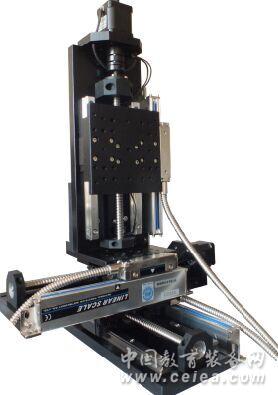
闭环三
轴
位移台
产品详细介绍名称: 三维高精度位移台 标准配备有步进电机和标准RS232接口,配合运动控制器可实现自动控制 进口高品质滚珠螺杆驱动,重复定位精度好,寿命长 新型轴端结构,防止螺杆松动,特别适合高速往复使用 导轨采用精密线性轴承导轨(两端支撑,中间悬空), 运动舒适,但承载较小, 适合单轴使用,垂直使用效果最好 步进电机和滚珠螺杆通过进口高品质弹性联轴节连接,传动同步且噪音小 配有手轮,方便调试 两端装有零位和限位开关,方便准确定位和保护产品 底座有标准孔距的螺纹孔和通孔,方便安装固定 可换装伺服电机,实现高速或轴向重载 产品技术参数名称:三维高精度位移台型号MZ3100栅光栅信号TTL信号行程(mm)100直线位移台输出位移分辩率 (mm)0.005直线位移台输出精度(mm)0.001直线位移台输出重复定位精度0.002光栅尺闭环控制软件控制光栅尺返回信息软件显示螺杆导程(mm)4标配电机(1.8度步进角)42步进电机中心负载(Kg)20重量(Kg)10 三维高精度精密闭环电动直线平台外形尺寸长:480mm宽:352mm高:352mm
容智科技
2021-08-23
单
轴
气浮平台
产品详细介绍技术指标: 矩形空气轴承,直线电机驱动 外形尺寸:250X130X140mm 设计行程:70mm 定位分辨率:1μm或0.5μm 重复定位精度:2μm 预留试验装置安装接口
北京慧摩森电子系统技术有限公司
2021-08-23
多
轴
精密运动平台
产品详细介绍多轴精密运动平台:采用直接驱动电机,无丝杠传动,全伺服驱动。微光栅编码器作为信号反馈机制,有多种结构形式,重复定位精度1微米到10微米,行程可定制。 支承系统可选空气轴承、滚珠导轨、滚柱轴承等。速度快,最大速度5米/秒(300米/分),加速度大,最大加速度1G到10G可选。 主要应用领域:精密运动设备、精密测试测量、电子设备、数控机床、MEMS、医疗设备等。
北京慧摩森电子系统技术有限公司
2021-08-23
一
轴
齿轮(超速档)
德州齿轮有限公司
2021-08-26
XM-H128高
智能
数字化综合护理
人
XM-H128高智能数字化综合护理人(高级成人护理模型) XM-H128高智能数字化综合护理人是一款整体仿真护理模型,她适用于从基础护理到专科护理技能的培训教学,可根据需要摆放多种操作体位。除能完成规定护理操作外,本品还配有无创血压手臂、生命体征模拟器和创伤救护评估组件,本品功能全面、形象逼真、操作真实,是教师示教、学生训练的得力助手。 功能特点: ■ 模拟人可取仰卧屈膝位,两腿外展后可独立支撑,左右上臂、小腿可灵活旋转。 ■ 瞳孔观察示教(瞳孔正常和瞳孔散大)。 ■ 面部清洁、口腔护理操作训练、假牙清洁护理训练、可人工产生劲动脉搏动。 ■ 气管插管操作训练:鼻胃管插管可用于洗胃、鼻饲操作训练。 ■ 吸氧操作训练、气管切开术后护理训练。 ■ 经口、鼻、气管套管进行模拟吸痰操作训练。 ■ 心音、呼吸音、肠鸣音的听诊训练。 ■ 血压测量操作训练。 ■ 静脉穿刺操作训练、三角肌肌肉注射操作作训练、臀部肌肉注射操作训练、股外侧肌注射操作训练。 ■ 回肠造口术与结肠造口术术后护理操作训练、引流术后护理、胸腔闭式引流术后护理、心包腔引流术后护理、T管引流术后护理、腹腔引流术后护理、气胸穿刺术后护理训练。 ■ 可互换男女外生殖器,进行导尿和灌肠操作训练。 ■ 创伤的评估和护理:消毒、换药、包扎、止血等,具有可更换的创伤模块。 ■ 更换卧位、搬运、整体护理、穿换衣物、冷热疗法等。 ■ AUDSim模块: · 共54种声音,语音21种(如:咳嗽、呕吐、喷嚏等)、心音14种(如:正常心音、窦性心动过缓、收缩期杂音等)、呼吸音13种(如:正常肺泡呼吸音、中水泡音、粗湿啰音等)、腹音6种(如:正常肠鸣音、肠鸣音减弱、胎心音等)。 · 图形化的操作界面形象直观,操作简便。 · 五路声音可同时播放,也可任意组合播放并有相应状态提示,音量大小分为八档,每路可单独调节。 · 中英文双语界面,大屏幕液晶显示。 · 可以外接音箱进行全体教学,也可以连接耳机自学,还可以通过人体模型外放。 ■ BPSim模块: · 在血压测量手臂上可以用真实血压计及听诊器进行无创血压测量。 · 具有korotkoff Gap音。 · 压力值采用动态毫米汞柱显示,血压设定值可以精确到1mmHg。 · 可设定收缩压、舒张压和脉搏频率,收缩压和舒张压在0-300mmHg之间连续可调。 · 音量大小可根据具体情况调节。 · 收缩压、舒张压、音量和心率在液晶屏上同时显示,模拟汞柱动态显示、可直观地表现袖带压力的变化过程。 · 自动校准,低功耗,待机10分钟后系统自动关机,普通市售碱性电池可以连续使用一学期以上。 ■ 子宫底检查训练评定(选配),可以安装在模型上使用,真实的耻骨联合解剖标志、可互换的子宫,包括硬的收缩良好的子宫、软的收缩不良的子宫。 ■ 控制出血大腿\控制出血手臂(选配),可以安装在模型上使用,可进行出血后的止血、包扎操作和断肢的止血和包扎。 ■ 着装式压疮护理模块(选配):可进行伤口清洗、分类、评估、长度测量。
上海欣曼科教设备有限公司
2021-08-23
体育场塑胶跑道
八
产品详细介绍珠海体育中心
保定市超达体育设施有限公司
2021-08-23
手术
视觉
导航定位系统
团队研发了手术视觉当行定位系统,采用多相机系统对带有视觉标签的手术器具进行实时定位和目标跟踪,视觉标签采用非对称分布的红外反射球,支持有源和无源两种视觉标签。其中高速高分辨率红外摄像机采用内置850nm红外光源阵列,120万像素红外CD,配合宽焦距范围镜头,视场角度可达90°以上。为减小系统延时,提高手术医生的体验感,研究基于FPGA的视觉数据并行计算定位算法,在相机本地通过FPGA快速计算得到单视角的定位数据,配合高速以太网标准的数据传输总线,能够达到20帧以上的满分辨率传输。中央控制器实时集多个相机的目标定位数据,进行信息融合计算,得到手术器具的高精度实时6自由度位姿。
复旦大学
2021-04-10
高精度
视觉
检测系统
高精度视觉检测系统具有自动瞄准、自动调焦、自适应调整光强、自动图像分割和自动目标识别等功能,并可根据客户要求定制附加功能,系统性能指标和功能与国外同类产品相当,价格远低于国外同类产品。 本系统适用于现代化工业产品关键尺寸的高精度在线和离线检测,可作为产品品质保证的最终检测设备,也可与加工生产设备集成为一体构成生产过程的实时反馈环节。 本测系统具有通用性强、精度高、效率高、能与柔性制造系统相连接等优点,可广泛应用于航空航天、机械、家电和汽车等生产和计量测试领域。
北京航空航天大学
2021-04-13
首页
上一页
1
2
...
82
83
84
...
315
316
下一页
尾页
热搜推荐:
1
云上高博会企业会员招募
2
64届高博会于2026年5月在南昌举办
3
征集科技创新成果



 搜 索
搜 索